・上一文章:帕萨特领驭停车辅助系统不起作用
・下一文章:别克英朗轿车无法摘下P挡
目前,一般的四轮定位仪的传感器由于受数码相机解析度及测量范围的限制,无法有效达到±20°的测量范围,因此无法在左转前轮20°、右转前轮20°下自动测量后倾角、内倾角及转向前展角。大多数四轮定位仪采用较小的转角来自动测量后倾、内倾角,用观察机械转角盘角度刻度的方法目测转向前展角、后倾角、内倾角。采用较小的转角自动测量后倾角、内倾角,损失了测量精度,增大了测量误差,并且通过目视转角盘的角度刻度转前轮,由于目视转角盘的角度刻度精度较差,很难将误差维持在± 0.5°。因此,目视转角盘的角度刻度测量前轮转向前展角、后倾角、内倾角的方法不科学,精度难达到车厂要求,而进口的高档定位仪采用一组电子转角盘来达到转向20°转角时自动测量后倾角、内倾角、转向前展角及最大转向角测量的目的。虽然电子转角盘能准确地测量出前轮的转角,但是也因此增加成本。
一、转向角的定义
当车辆直线行驶时,各轮胎必须保持平行一致向前,否则会造成轮胎磨损。车辆于转弯时,四个轮胎需围绕着同一圆心转弯才能将轮胎横向磨擦减低最小,此圆心与轮胎的距离为转弯半径。由于内外侧轮转弯半径不同,外侧轮的转弯时需小于内侧轮。因此转向前展角就是当车辆最大转向时的前轮前束。
二、测量最大转向角的特点
一种测量车辆转向角的系统包括CMOS相机、测量目标,其特征在于将CMOS相机安装在车辆的前轮,把测量目标置于车辆后轮,所述系统测量前轮内倾角与前轮水平角改变量,用水平角改变量除以前轮内倾角得到最大转向常数,通过公式对最大转向常数进行计算,得到车辆的最大转向角。
三、测最方法
1.多镜片增加摄像机视角范围原理
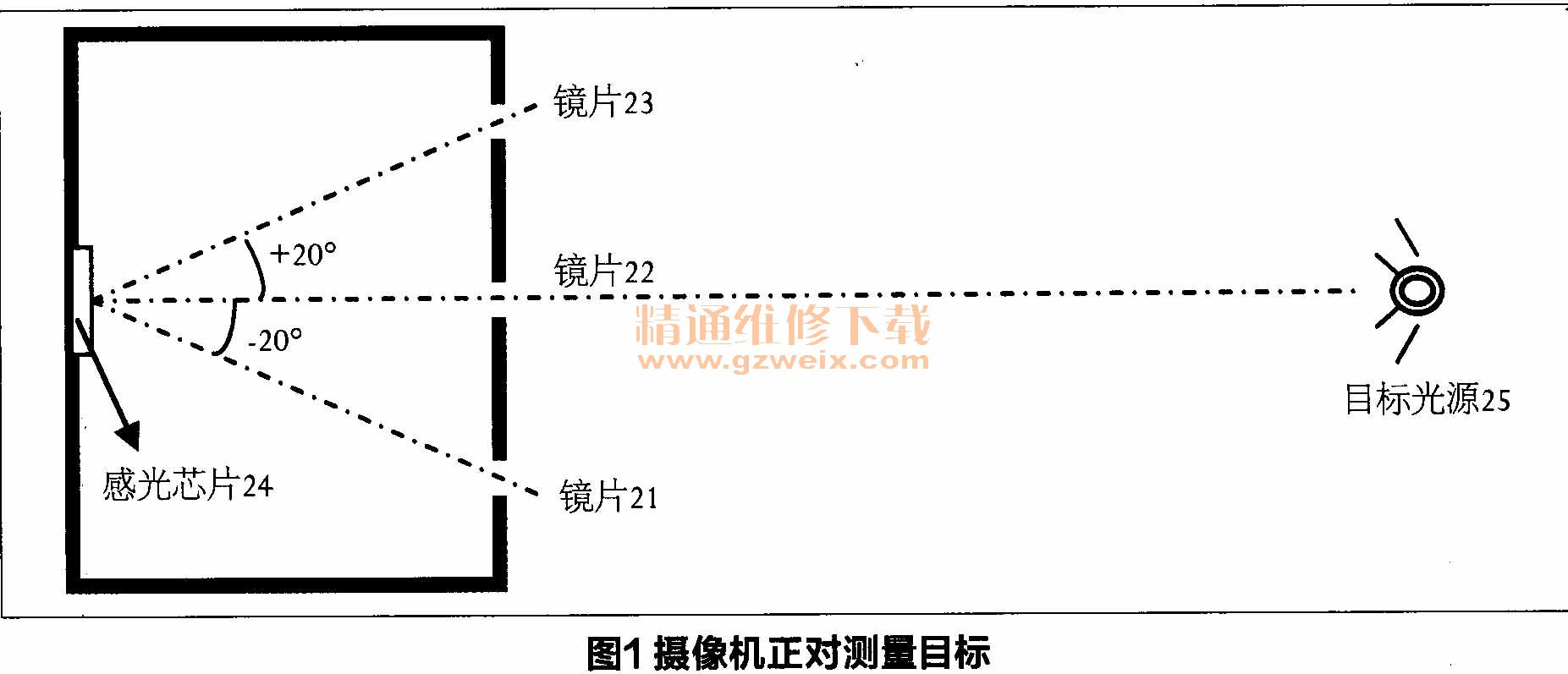
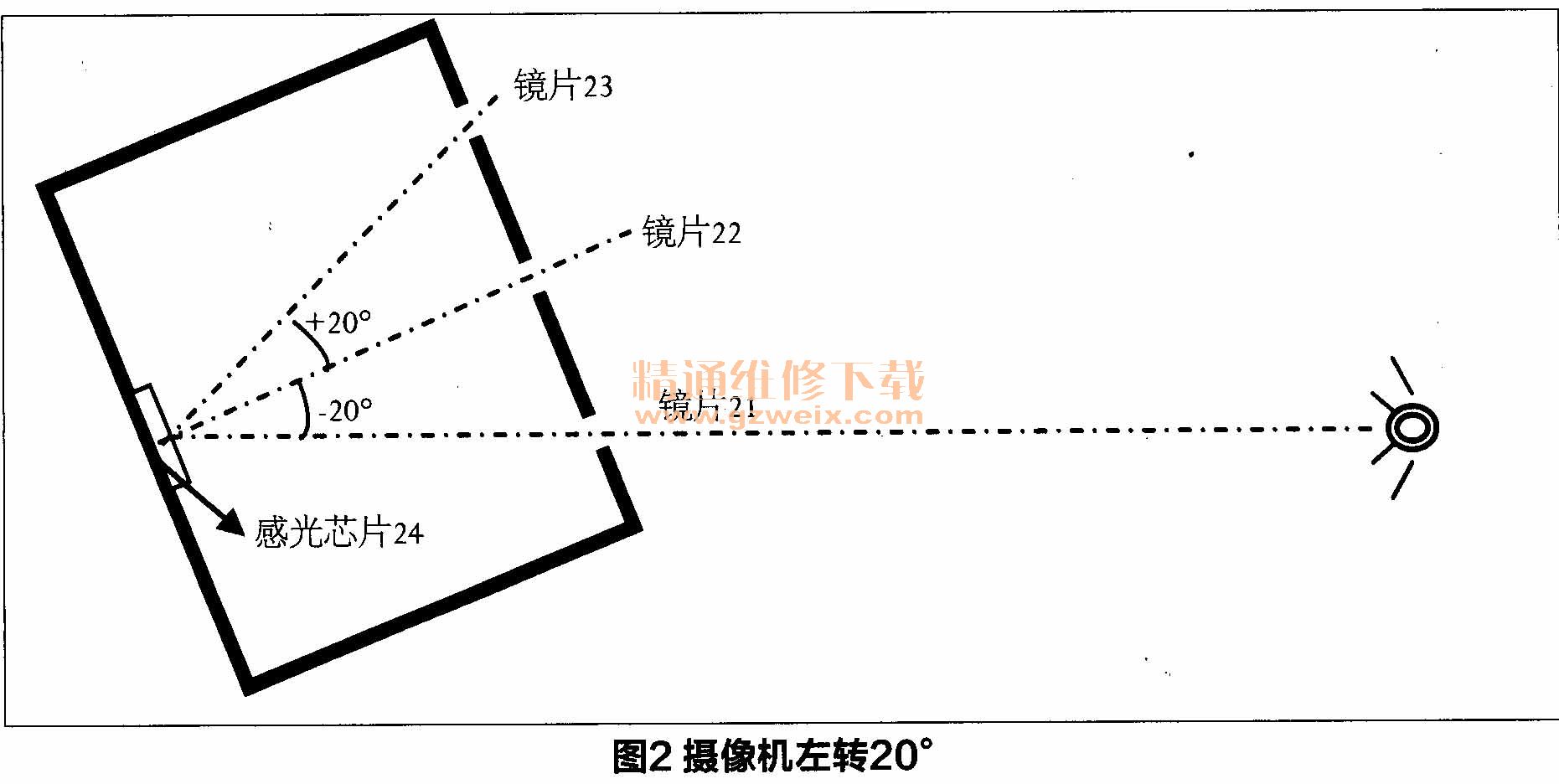
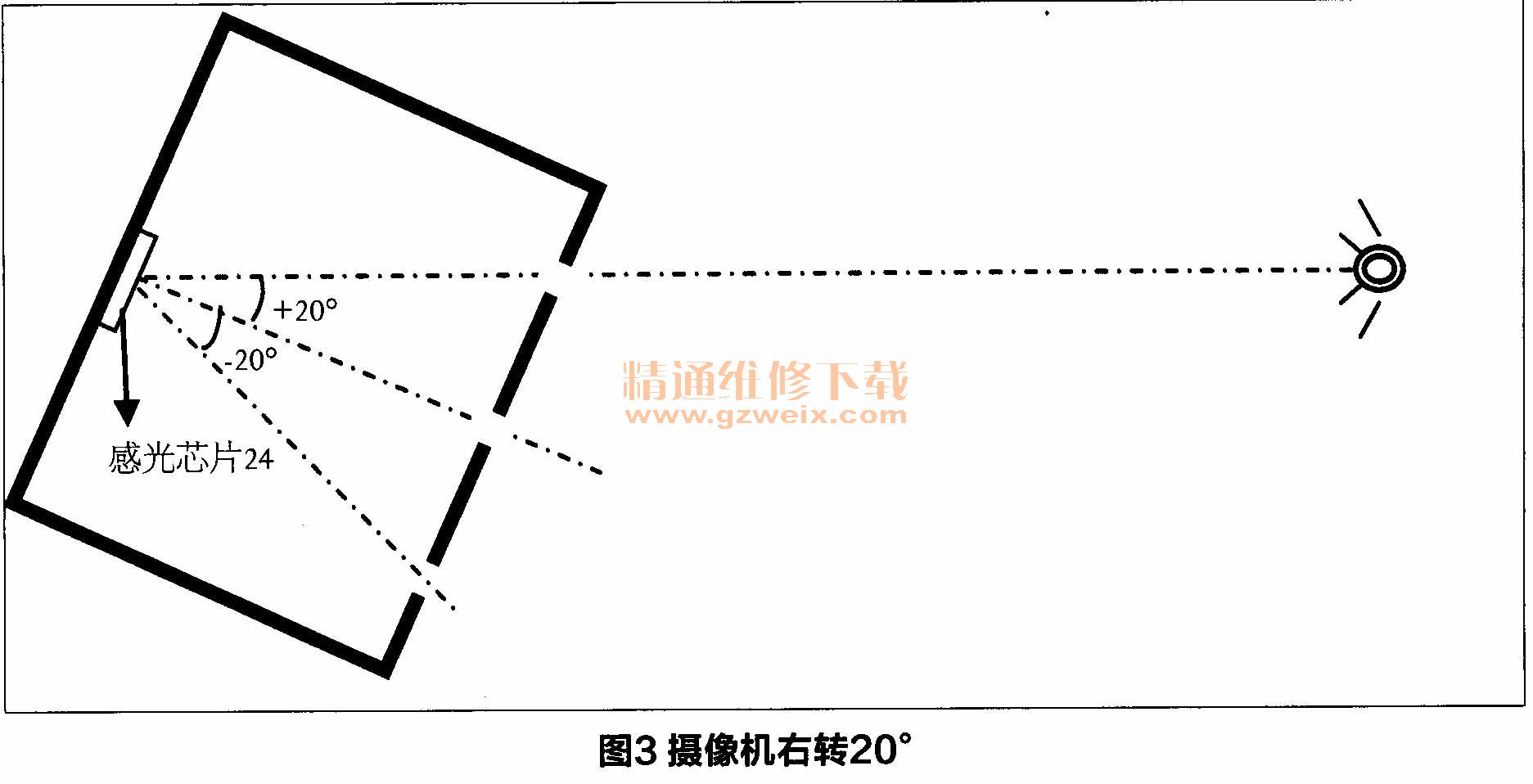
利用光学成像原理,在前束摄像机上装三个镜片互成-20°、0°、20°扩大摄像机测量角度超过40°。摄像机正对不动的测量目标25时,其成像经过0°镜片22投影,于小角度的成像接收面24(图1)。在摄像机左转20°时,-20°镜片21将被转到斜对到不动的测量目标25,其成像如同摄像机正对时一样(图2)。同理,在摄像机右转20°时,20°镜片23将被转到正对到不动的测量目标25,与同摄像机正对时一样(图3)。
辩明在成像接收面24上收到的映像是从哪一个镜片投影的有多种方法,最简单的方法是利用车辆转向轮前束改变时带动外顷角及内倾角的以下特性。
(1)前轮左转时右轮前束增加,外倾角减少及内倾角增加;前轮右转时左轮前束增加,外倾角减少及内倾角增加。如果测量的前束不增反减则表示此前束必定是经由另一个镜片投影。
(2)前轮左转时左轮前束减少,外倾角增加及内倾角减少;前轮右转时右轮前束减少,外倾角增加及内倾角减少。如果测量的前束不减反增则表示此前束必定是经由另一个镜片投影。
2.自动测量最大转向角首先将摄像机安装在前轮,把光源置于后轮,测量步骤如下。
(1)测量前轮的主销内倾角。
(2)用前束摄像机转到前轮直行即左右前束相等。
(3)用水平倾斜仪量出其左轮水平角或左轮外倾角、右轮水平角或右外倾轮角、左轮前束、右轮前束。
(4)向左转到最大转向角时再用水平倾斜仪量出其左轮水平角或左轮外倾角、右轮水平角2或右外倾轮角、左轮前束、右轮前束
(5)向右转到最大转向角时再用水平倾斜仪量出其左轮水平角或左轮外倾角、右轮水平角或右州顷轮角、左轮前束、右轮前束。
(6)根据实际测量某一款车型得出以下数据(见表1)。

四、结论
本技术解决的问题有二,一是用低成本设计完成在转左前轮左20°及转右前轮右20°时自动测量后倾角、内倾角及转向前展角;二是用低成本达到自动测量最大转向角的技术。
一般增加摄像机视角范围的设计方法是缩短焦距或加长成像接收面。加长焦距可增加视角范围但反效果是像素解析度降低,达不到测量精度要求。加长成像接收面可增加视角范围但反效果是成像接收器成本倍数增加。利用多镜片可将短摄像机视角延长连接成大视角,应用于四轮定位前束角测量。
")
")
")
")

