・上一文章:中国汽车维修行业的危机与应对(一)
・下一文章:大众0AM型直接换挡变速器更换电子液压单元后需不需要“在线匹配”
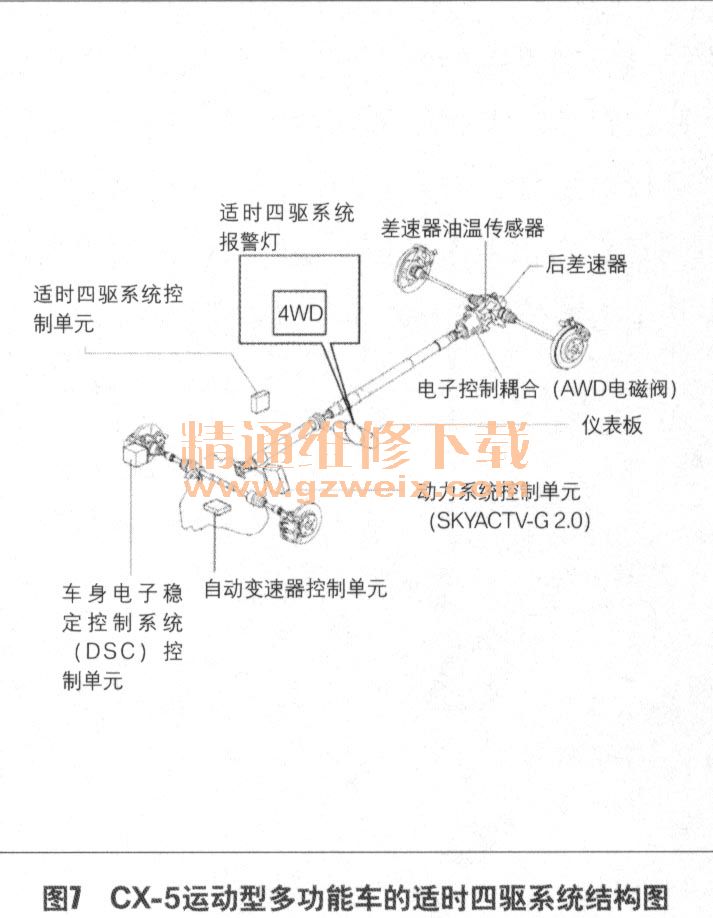
3.适时四驱系统(AWD)
CX- 5运动型多功能车的适时四驱系统工作原理如下(图7)。
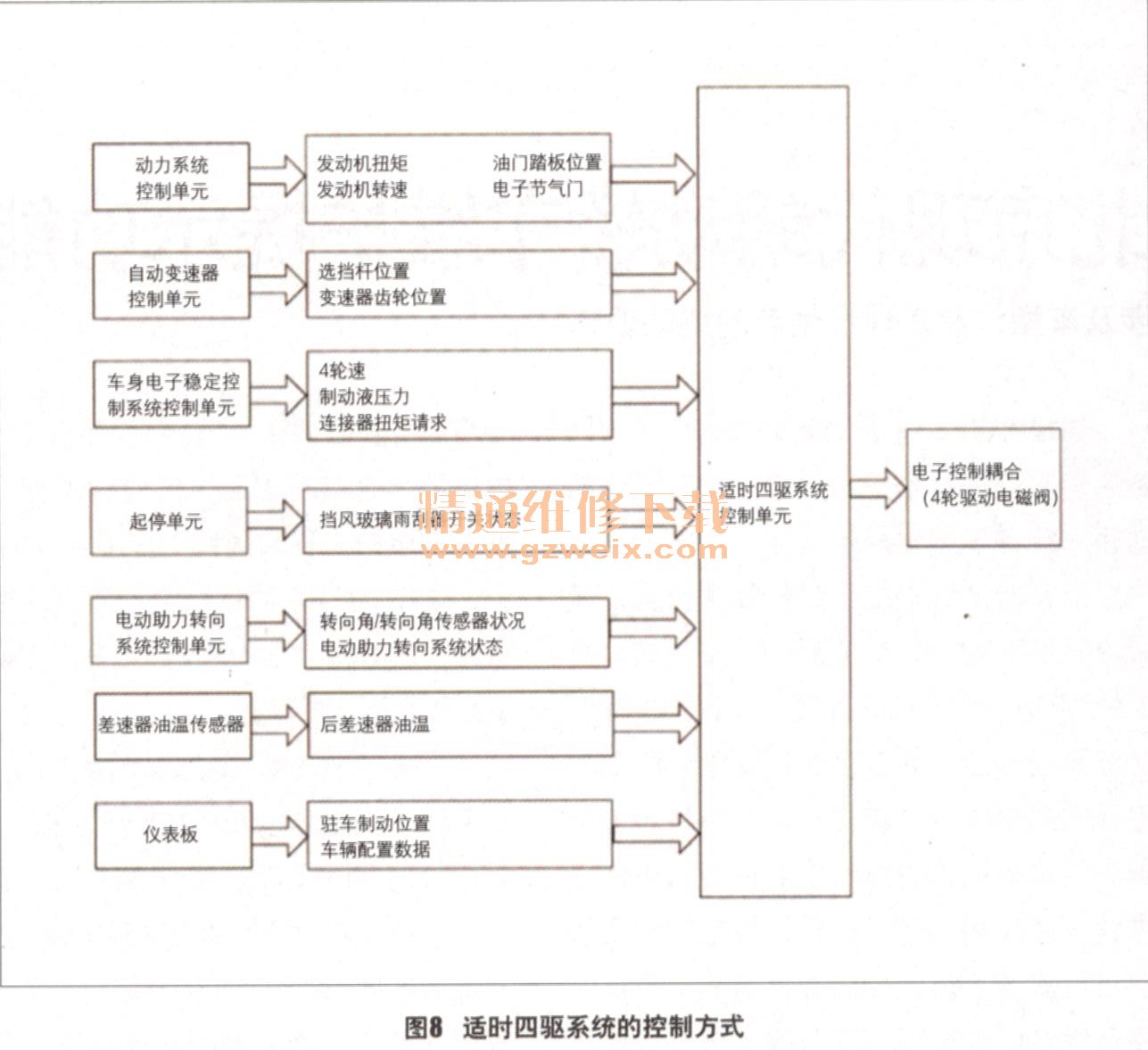
(1)正常控制
在车辆起动或直线行驶过程中加速时,适时四驱系统对传递给后轮的扭矩进行优化控制,以确保有足够的加速性能。因此,改进了静止起动和加速性能。当向适时四驱系统控制单元输入了驻车制动信号时,控制单元将控制传递给后轮的扭矩(图8)。
(2)急转弯控制
当适时四驱系统控制单元判定车辆正在急转弯时,它将减小传递给后轮的扭矩以避免出现紧急转弯制动。
(3)集成DSC控制
如果从车身电子稳定控制系统(DSC)控制单元输入到适时四驱系统控制单元的信号表明已启动了制动防抱死系统(ABS)控制,适时四驱系统控制单元将控制传递给后轮的扭矩以避免对ABS控制造成不当影响。另外,当从车身电子稳定控制系统控制单元接收到理想制动力矩请求信号时,适时四驱系统控制单元也将控制传递给后轮的扭矩使之与请求扭矩量相匹配。
(4)其他控制
当后差速器油温超过规定值或前、后轮转速出现较大异常变化(例如试图脱离接合状态)时,将暂停控制以保护适时四驱系统,当发生该情况时,适时四驱系统报警灯将被点亮并闪烁,以提示驾驶员适时四驱系统发生故障。
4.多路通信系统
CX-5运动型多功能车的多路通信系统包含了LIN网络和CAN网络,其中CAN网络又分为了HS-CAN和MS-CAN网络(图9)。LIN网络囊括了电流传感器、DC-DC转换器、前照灯控制(水平/旋转执行器控制)以及自动灯光雨刮传感器。
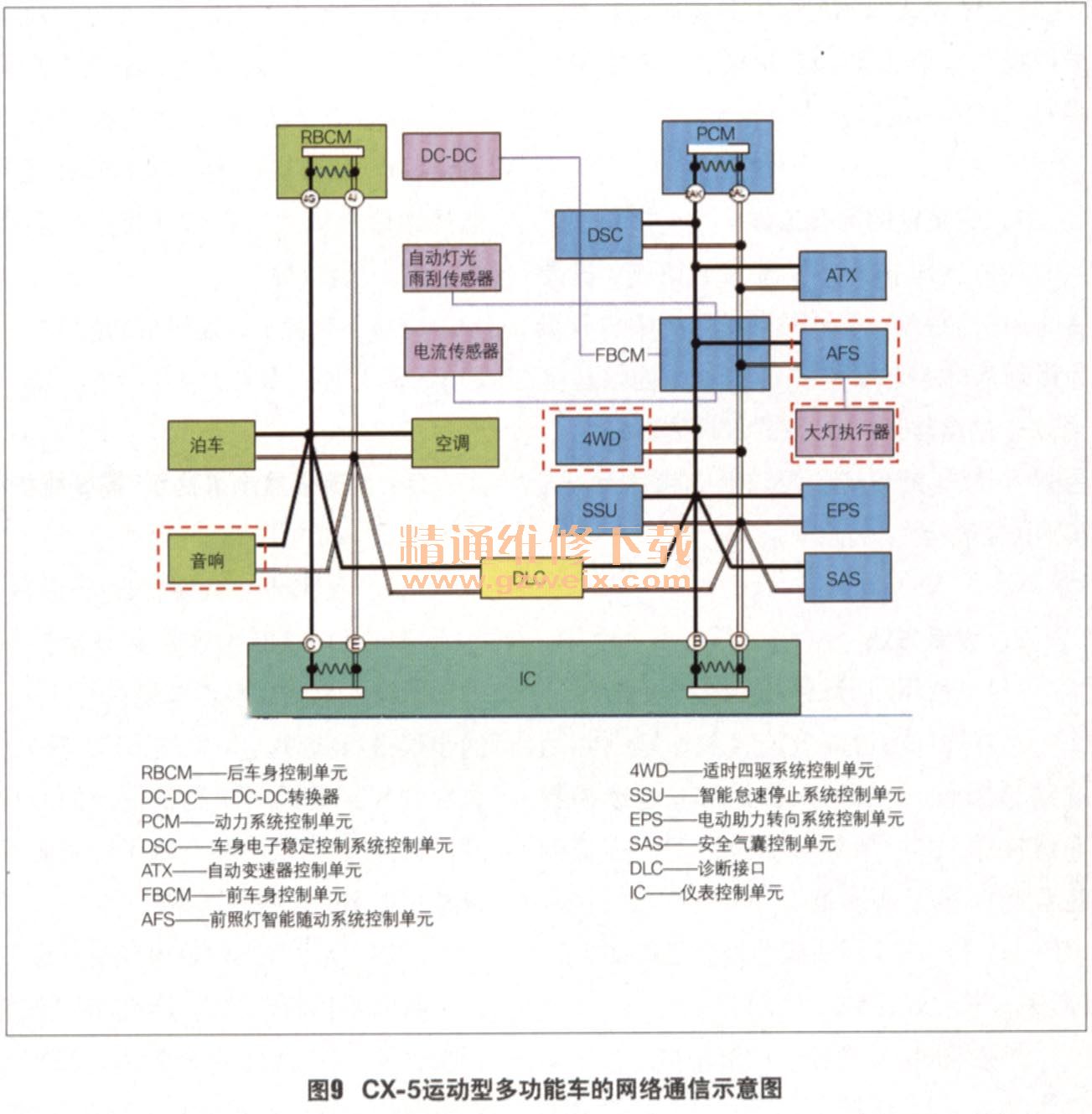
而日S-CAN网络囊括了动力系统控制单元 (PCM)、车身电子稳定控制系统(DSC)控制单元、变速器控制单元(TCM)、前照灯智能随动系统( AFS)控制单元、前车身控制单元(FBCM )、适时四驱系统控制单元、i-stop智能怠速停止系统(SSU)控制单元、电动助力转向系统(EPS)控制单元、安全气囊系统(SAS)控制单元以及仪表板控制单元。MS-CAN网络则囊括了后车身控制单元(RBCM)、驻车传感器控制单元、气候控制单元以及仪表板控制单元。
")
")
")
")

