・上一文章:别克君威4T65E变速器换档冲击及换档打滑
・下一文章:江铃新世代全顺发动机异响
在2007年3月开始实施年款改进措施的宝马E60系列轿车上采用了具有停车和起步功能的新型主动定速巡行控制系统(以下简称具有停车和起步功能的ACC)。该系统的采用虽然明显扩大了运行范围,但该巡行控制系统仍是用于减轻驾驶人负担而非可以取代驾驶人的系统。该系统始终都由驾驶人来负责合理使用,驾驶人必须始终密切注意实际路况,只有这样,驾驶人才能在具有停车和起步功能的ACC达到自身限值时及时、有效地进行干预。
具有停车和起步功能的ACC将有效工作范围扩展到低速行驶直至停车的车速范围内自动对车距和车速进行调节。当系统识别到可以重新起步时就会向驾驶人发出一条提示信息,需要重新起步时,驾驶人必须通过控制操纵杆或加速踏板对该提示信息进行确认。只有在停车时间很短的情况下,系统才会自动完成起步过程。因此具有停车和起步功能的ACC能在越来越频繁堵车的情况下为驾驶人提供最佳帮助,但该系统不适用于有十字路口或红绿灯的市区道路。
1 具有停车和起步功能的ACC的组成
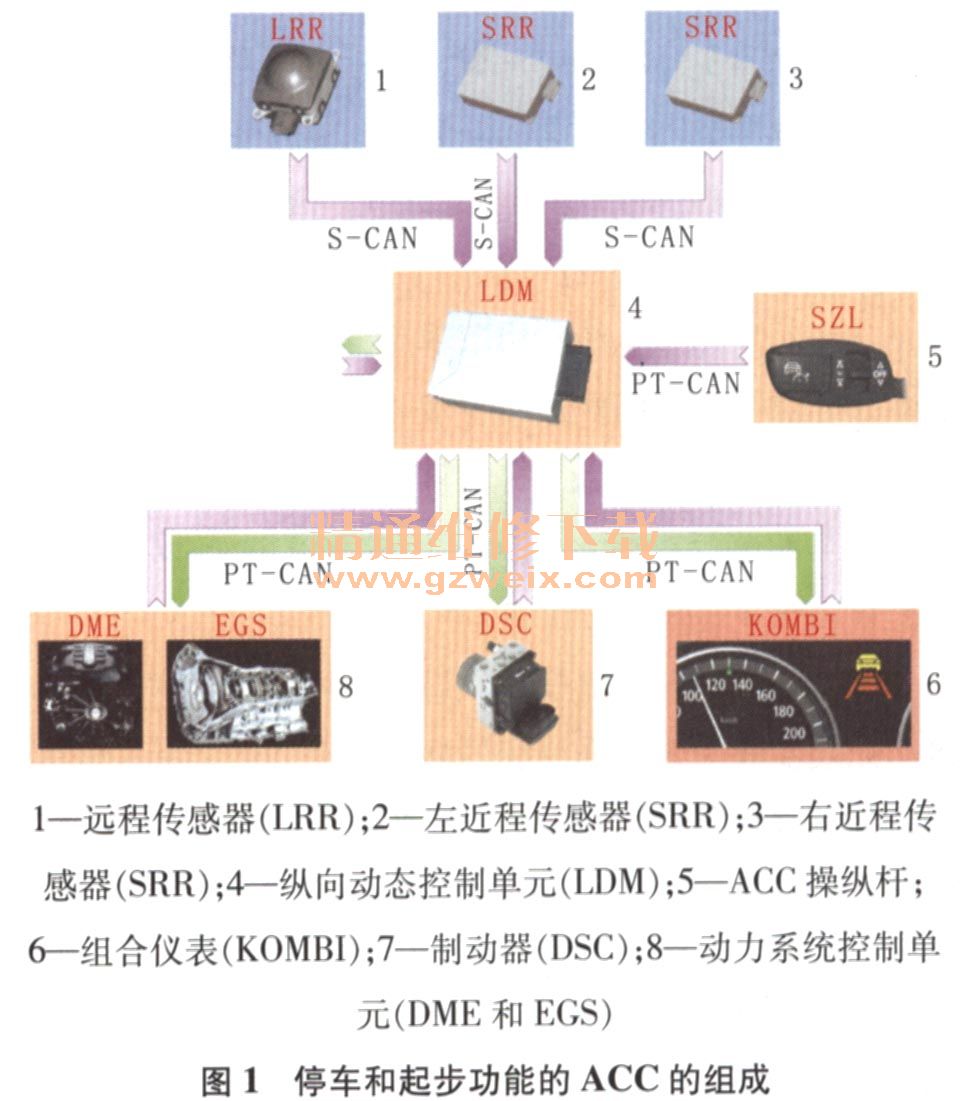
如图1所示,该系统由远程传感器(LRR)、近程传感器(SRR,左右各1只)、纵向动态控制单元(LDM),ACC操纵杆、组合仪表(KOMBI)、制动器(DSC)、动力系统控制单元(DME和EGS)组成。
2 车辆周围区域的信息
2.1探测目标
探测前方道路是主动定速巡行控制系统最重要的一项功能。随着停车和起步功能的引入,系统不仅要满足远程探测要求,而且还必须能够满足接近车辆前部的近程探测要求,因为低速行驶时车距可能只有几米,因此无法仅仅通过一个雷达传感器来满足上述要求,于是在ACC传感器(现在称为远程传感器)的基础上又增加了2个近程传感器(图2)。除探测目标外,这些传感器还负责确定目标的位置及目标相对于车辆的速度,这些数值用于车距调节。

2.2预先处理目标数据
雷达传感器对目标数据(位置和移动参数)进行初步处理。雷达传感器不断跟踪各个未定目标,以消除探测间隙,此外还对目标数据进行初步过滤。
在LDM内进行第2个处理步骤。首先统一位置数据,并根据雷达传感器相对于车辆中心轴偏离的安装位置进行校正;随后合并各个传感器提供的目标数据(因为一些传感器的探测范围重叠,特别是在近距离内会出现这种重叠的情况,此时通常不只一个传感器会探测到前方目标),合并目标数据后进一步进行数据过滤,以满足车距调节功能的特殊要求。
2.3评估目标
为了确定车距调节功能以哪个目标为基准,系统为每个目标都计算了一个评估等级。计算过程参考下列2项主要标准:一是目标相对于车辆的位置和移动速度,目标离车辆越近和(或)目标向车辆移动的速度越快,评估等级就越高;二是目标在自身车道内的停留情况,由于雷达传感器系统无法识别出实际车道或车道上的标记,用于偏离车道警告系统的摄像机系统信息也无法提供给ACC,因此具有停车和起步功能的ACC与传统的ACC一样,也要计算出向前行驶的大致车道路线。
车辆行驶时,系统利用车辆自身移动情况的参数探测静止目标位置。车辆静止时,主要根据转向角传感器信号分析结果进行计算,就是说,在车辆静止时转动转向盘会改变具有停车和起步功能ACC计算出的车道路线,因此探测目标的评估结果也会随之改变。
车距调节功能最终使用具有最高评估等级的目标。在这个处理步骤中也根据目标的移动状态划分目标,分为移动目标和静止目标。在调节过程中对静止目标(自初次探测到该目标以来)进行特殊处理。
3 调节功能
3.1定速巡行控制
该系统定速巡行控制功能的工作原理基本上与传统的ACC相同,在此不再赘述。
3.2车距调节
车距调节功能是所有ACC系统的核心功能,在具有停车和起步功能的ACC上,该功能集成在LDM内(与E9x系列车的ACC的区别在于其车距调节功能集成在ACC控制单元内),驾驶人可通过操纵杆上的翘板开关(分4个挡位)选择预期车距,具有停车和起步功能的ACC根据预期车距等级计算出进行调节的规定车距(图3)。
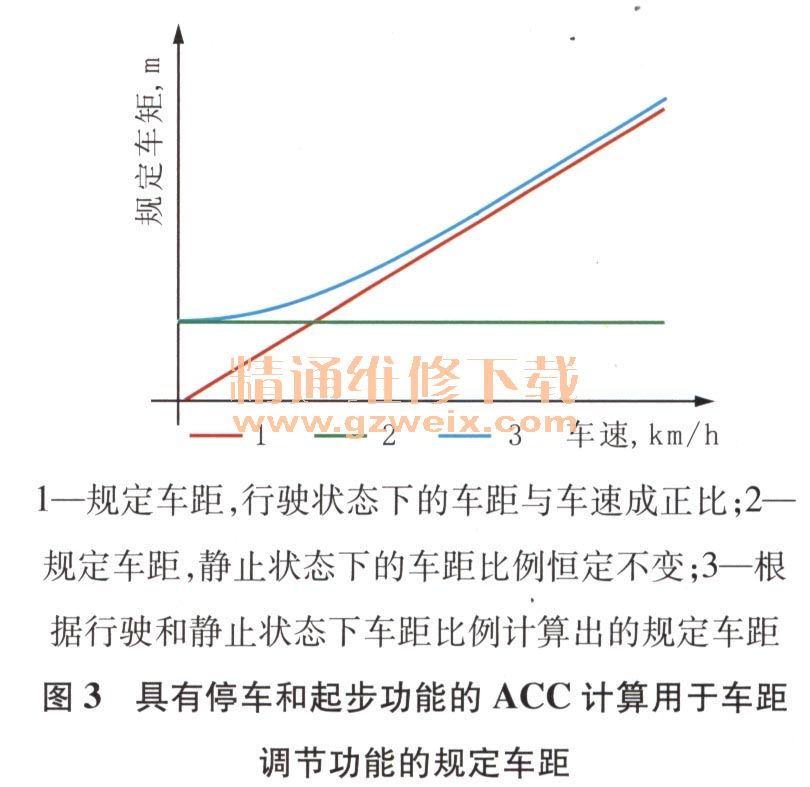
从图3中可以看出,与传统的ACC相同,行驶期间的规定车距(称为第1个车距)与车速成正比;低速行驶和车辆静止时,具有停车和起步功能ACC的车距(称为第2个车距)比例所占比重较大,该车距比例是一个固定值,如果不考虑该车距比例,则静止状态下的规定车距为零,这个车距比例用于设置预期的静止车距(大约为5 m)。根据2个车距比例计算出规定车距。车速不同时,这2个车距比例所占比重不同。车距调节功能将最高评估等级目标的初步处理数据作为输入参数。与传统的ACC系统相比,这种调节功能还要满足下列附加要求。
(1)提高了最大加速度和最大减速度。这种改进措施针对的是低速范围(低于大约50 km/h),因为驾驶人自身要在该车速范围内利用更高动力,同时还要感觉舒适。具有停车和起步功能的ACC根据具体情况,最大加速度可达到约2 m/s2,最大减速度约为4 m/s2。从技术角度来看可以提高到这种程度,因为一方面可以通过附加的近程传感器提高探测前方车辆的可靠性。此外还能更可靠地计算出该车速范围内的自身车道,因此改善了针对调节功能选择相关目标的效果。
(2)车流稳定性。在交通密集的情况下缓慢行驶时有一点非常重要的,即后方车辆不能比前方车辆的纵向加速度更大,否则,在车流前部车辆稍稍减速的情况下,车流后部的车辆可能就需要完全制动了。因此,具有停车和起步功能ACC的车距调节功能负责及时做出反应。
3.3转弯速度调节
具有停车和起步功能ACC的转弯速度调节功能以带制动的主动巡航控制系统(DCC)的转弯速度调节功能为基础,扩展功能时考虑到了雷达传感器探测范围的横向限值。如果当前行驶弯道过窄以致无法探测目标,该功能就会进行干预并防止车辆加速。
3.4规定值的优先顺序排序
具有停车和起步功能ACC的规定值优先顺序排序基本与DCC相同。车距调节功能主要增加了一项新的调节规定值。
3.5干扰力评估
具有停车和起步功能ACC的干扰力评估也以DCC的评估方式为基础,但是仍进行了大量细节改进工作,因为低速行驶时(低于30 km/h)干扰力评估结果的不准确性明显高于高速行驶时,因此必须在提高评估准确性的同时更迅速地根据干扰力的变化进行调整。
3.6控制执行机构
除针对车辆静止状态扩展了LDM与DSC控制单元之间的数据接口外,具有停车和起步功能ACC控制执行机构的方式与E9x系列的DCC或ACC相同,区别在于具有停车和起步功能的ACC使车辆静止后,还会接通制动信号灯。
4 操作和显示
4.1启用条件
如果在行驶期间需要启用具有停车和起步ACC的功能,必须满足与以往主动定速巡行控制系统一样的启用条件:未踩下制动踏板;挂入自动变速器的行驶挡位;未操作驻车制动器;已接通DSC,且没有进行干预调节;雷达传感器系统处于准备状态且没有污染;未识别出系统故障。
4.2在行驶期间启用系统
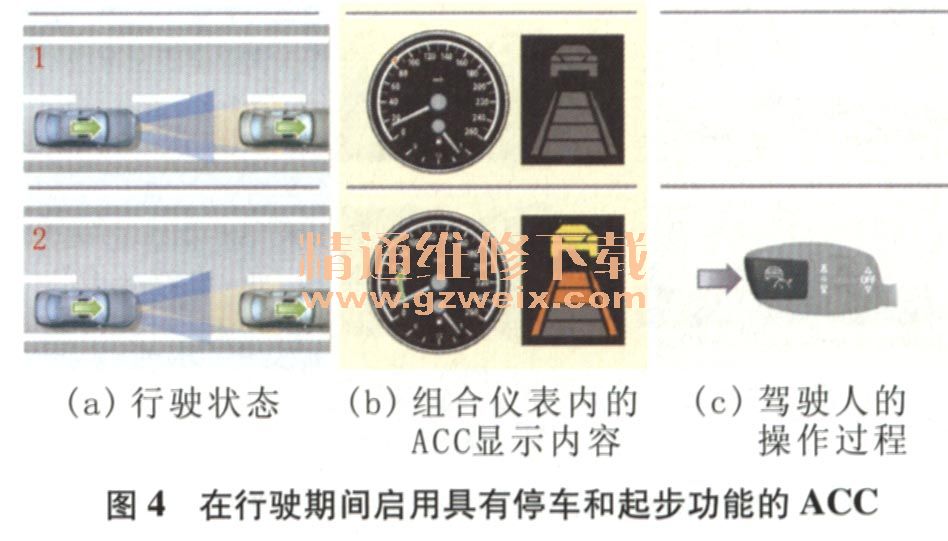
与传统的ACC不同,在车速低于30 km/h(20 mph)的情况下,识别到前方车辆时就会启用具有停止和启动功能的ACC功能。
如图4所示,1表示的为未启用具有停车和起步功能的ACC时的状态,因为之前启用过系统后存储了一个预期车速(橙色标记),目标和车距显示处于关闭状态;2表示的通过操作继续按钮接通具有停车和起步功能的ACC状态,预期车速标记变为绿色,车辆加速至预期车速或根据预期车距挡位调节与前方车辆之间的车距。
4.3在车辆静止状态下启用系统
如图5所示,1表示具有停车和起步功能的ACC未启用,因为之前启用过系统后存储了一个预期车速(橙色标记),目标和车距显示处于关闭状态,驾驶人踩下制动踏板并使车辆保持在静止状态。2所示为驾驶人继续踩住制动踏板并按下按钮,因此接通了具有停车和起步的ACC功能,同时接通了目标和车距显示,预期车速标记仍为橙色。3所示为驾驶人松开制动踏板,处于启用状态的具有停车和起步功能的ACC通过控制制动器继续使车辆保持静止状态,预期车速标记仍为橙色,表示具有停车和起步功能的ACC不会使车辆自动起步。

")
")
")
")

