・上一文章:车联网技术在商用车上的应用
・下一文章:双冷却系统在跨骑式正三轮摩托车上的应用
摘要:本文介绍一种市政渣土车智能监控系统基本构成,分析其工作原理,并通过测试流程实车控制测试,达到人性化管理渣土车的目的。
1 渣土车智能监控系统构成
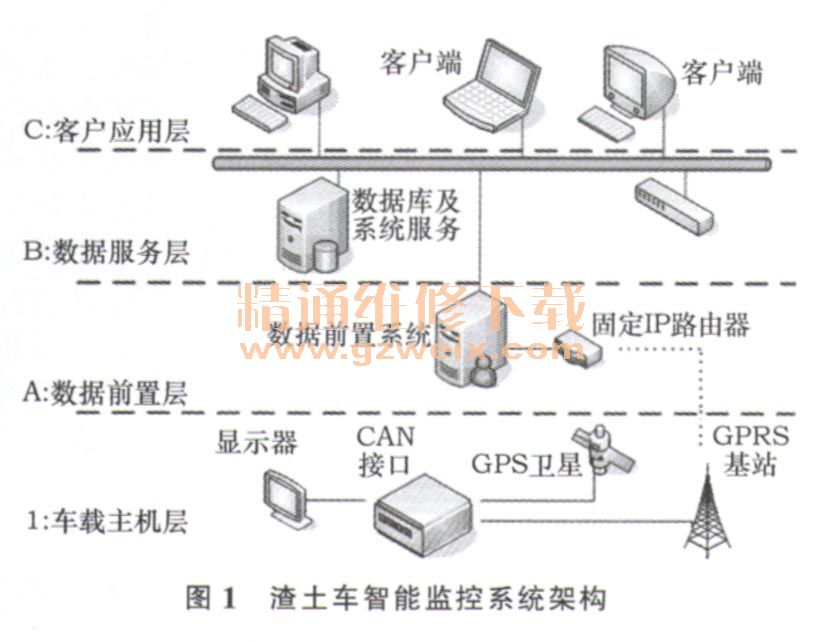
智能监控系统主要由三大部分组成:车载GPS/北斗车载终端、通信网络和调度监控平台。其中车载GPS/北斗车载终端负责接收、发送GPS/北斗定位信息、状态信息及控制信息;通信网络则是实现车辆与调度监控中心信息交换的载体,如GSM/GPRS及Internet;调度监控平台是整个智能监控系统的通信核心,负责与车载GPS/北斗车载终端的信息交换、各种内容和控制信息的分类、记录和转发。渣土车智能监控系统使用当前主流的系统架构:GPS/北斗C/S架构源代码,即运营服务器+远程客户端(本地电子地图)架构,如图1所示。
1.1车载GPS/北斗车载终端
系统车载终端需满足GB/T 19056-2012《汽车行驶记录仪》和JT/T 794-2011《道路运输车辆卫星定位系统北斗兼容车载终端技术规范》的要求,并取得相关认证。
1.1.1车载终端硬件平台
车载终端硬件平台主要包括微处理器、GPS/北斗模块、GPRS模块和外设控制模块等四大模块。
1)微处理器基于ARM7内核的32位嵌入式微处理器LPC 1778,结合了高达512KB的嵌入式微控制器高速闪存。128位宽度的存储器接口和独特的加速器结构,使代码在最大时钟速率下执行。集成了4个DART、 2个CAN通道,1个SPI接口,3个I2C接口,I2S接口和1个串行端口。含32KB SRAM,多个32位定时器,10位ADC和看门狗定时器(WDT) 。
2) GPS/北斗模块采用和芯星通公司的UM220主芯片,此芯片为多功能独立型GPS/北斗模组,以ROM为基础架构,成本低,体积小。通过外接GPS/北斗接收机,将接收到的GPS/北斗原始信息,送入嵌入式微处理器进行数据解析,最终得出车辆所在位置的经纬度、速度和海拔等信息。
3) GPRS模块M 12-D模块接口简单,使用方便且功能强大。其中GPRS模块与微处理器间通过串口进行通信,通信协议为AT命令集。车载终端与监控中心之间的通信通过自带TCP/IP协议的GPRS无线通信模块QUECTEL M 12-D实现,GPRS无线通信模块M10通过GPRS无线网络接入Internet网络,将GPS/北斗定位数据以透明方式传输,通过RS232接口接收数据即可工作。GPRS数据传输是无线通信模块M 12-D的核心功能,其控制主要包含建立数据账户(data account)、激活PDP (Packet DataProtocol、分组数据协议)环境、TCP或UDP连接、关闭GPRS连接4个步骤。
4)外设控制模块包括电源、JTAG调试接口、复位电路、硬件驱动5寸TFT型LCD液晶屏,用于人机交互以及解析后的GPS/北斗信息显示。USB主口用于扩展U盘和数据存储,JTAG调试接口用于硬件调试以及烧载Bootloader。
1.1.2车载终端软件平台
软件平台为嵌入式操作系统ucos II,支持嵌套中断、更好的任务响应、更多的优先级别;支持串口和CAN通信;丰富的API函数,具有强大的开发工具;多硬件平台支持ARM、 MIPS等处理器。
1.1.3定位信息数据格式
车载终端输出数据遵循NMEA-0183协议标准,即美国海军的电子设备标准。该协议定义了GPS/北斗接收机输出的标准信息,最常用、兼容性最广的语句格式包括:$GPRMC、 $GPGGA、$GPGSV、$GPGGA、$GPGLL等。应用到的GPS/北斗数据格式包括$GPRMC、$GPGGA、$GPGSV三种。其中,用$GPRMC语句获取时间、经纬度、速度、年月日信息,用$GPGGA语句获取海拔高度信息,用$GPGSV语句获取可见卫星数信息及卫星的方位角和仰角信息,用以获取卫星的视图。
1.2通信网络
车载终端的GPS/北斗模块能够时刻接收来自卫星的信号,计算出其位置、速度等信息,车载终端需要将这些信息传送至监控平台,两者之间的通信必不可少,由于车载终端的特殊性,无线通信是惟一的通信方式,卫星和基站被作为智能监控系统的通信链路。
1.3监控平台
监控平台是基于GIS技术开发的远程可视指挥和监控管理平台,对所有现场车辆监控,实现音视频双向交互指挥,监控中心的电子地图上可以显示车辆所在的直观位置,并通过无线网络对车辆进行监控设置,同时可实现监控中心对可控范围的运营车辆进行实时、集中、直观地监控和调度指挥。
")
")
")
")

