・上一文章:车联网技术在商用车上的应用
・下一文章:双冷却系统在跨骑式正三轮摩托车上的应用
2 智能监控系统工作原理
2.1系统各零部件工作原理
2.1.1车载终端
车载终端是智能监控系统的前端设备,集定位、通信、汽车行驶记录仪等多项功能,具有强大的业务调度功能和数据处理能力,通过采集的各类传感器信号状态判断车辆的载重、举升以及环保盖开合,根据不同的逻辑要求,对车辆进行语音警示甚至限速,并将违规车辆信息上传监控平台。同时可与发动机ECU进行心跳报文交互,明确自身存在,防止被拆除。
2.1.2空重载传感器
采用欧姆龙E2E-X18ME 1型NPN常开接近开关,检测距离18 mm(顶盖开合传感器和货厢举升传感器采用同型号)。实时监测车辆的载重状况,并将载重信号传递给控制器,控制器对载重信号进行计算处理,得出车辆的实际载重量,车辆空载时控制器输出低电平(0),当车辆重载时输出高电平(24V) 、车载终端根据输入电平高低判断车辆的载重状况。
2.1.3顶盖开合传感器
安装在货厢密闭篷布导轨的后方,用以检测密闭篷布的状态。当篷布完全遮盖货厢时,传感器输出高电平(24 V ),当篷布卷起(顶篷未密闭)时输出低电平(0),车载终端根据输入电平高低判断货厢篷布是否密闭。
2.1.4货厢举升传感器
安装在货厢底部大梁上,通过货厢上的支架感应产生信号,用以监测货厢的举升状态。当货厢举升时,即货厢底平面与车架水平面角度大于10”时,传感器输出高电平(24 V ),当货厢未举升时,输出低电平(0),车载终端根据输入电平高低判断货厢是否举起。
2.1.5车速里程传感器
采用霍尔感应接触式传感器,每转输出8个脉冲,安装在变速器输出轴上,用以提供车辆以及车载终端速度信号,车载终端根据车速输入信号判断车辆实际行驶速度。
2.2系统工作原理
北斗车载终端通过采集空重载传感器高低电平信号,可判断渣土车空载或重载;通过采集传感器车速脉冲信号,可判断车辆的实际行驶速度;通过采集顶盖开合传感器高低电平信号,可判断密闭顶盖是否关闭;通过采集货厢举升传感器高低电平信号,可判断车辆货箱是否在举升状态。车载终端通过传感器信号可判断车辆载重、顶盖状态、货厢举升状态以及车速信息,同时通过GPS信号,判断车辆位置、时间等信息;发现车辆违规,车载终端首先进行语音警示,驾驶员对违规行为不更正,则通过CAN报文要求发动机ECU对车辆进行限速,同时通过无线网络将车辆、驾驶员信息发送至监控平台。交互关系如图2所示。
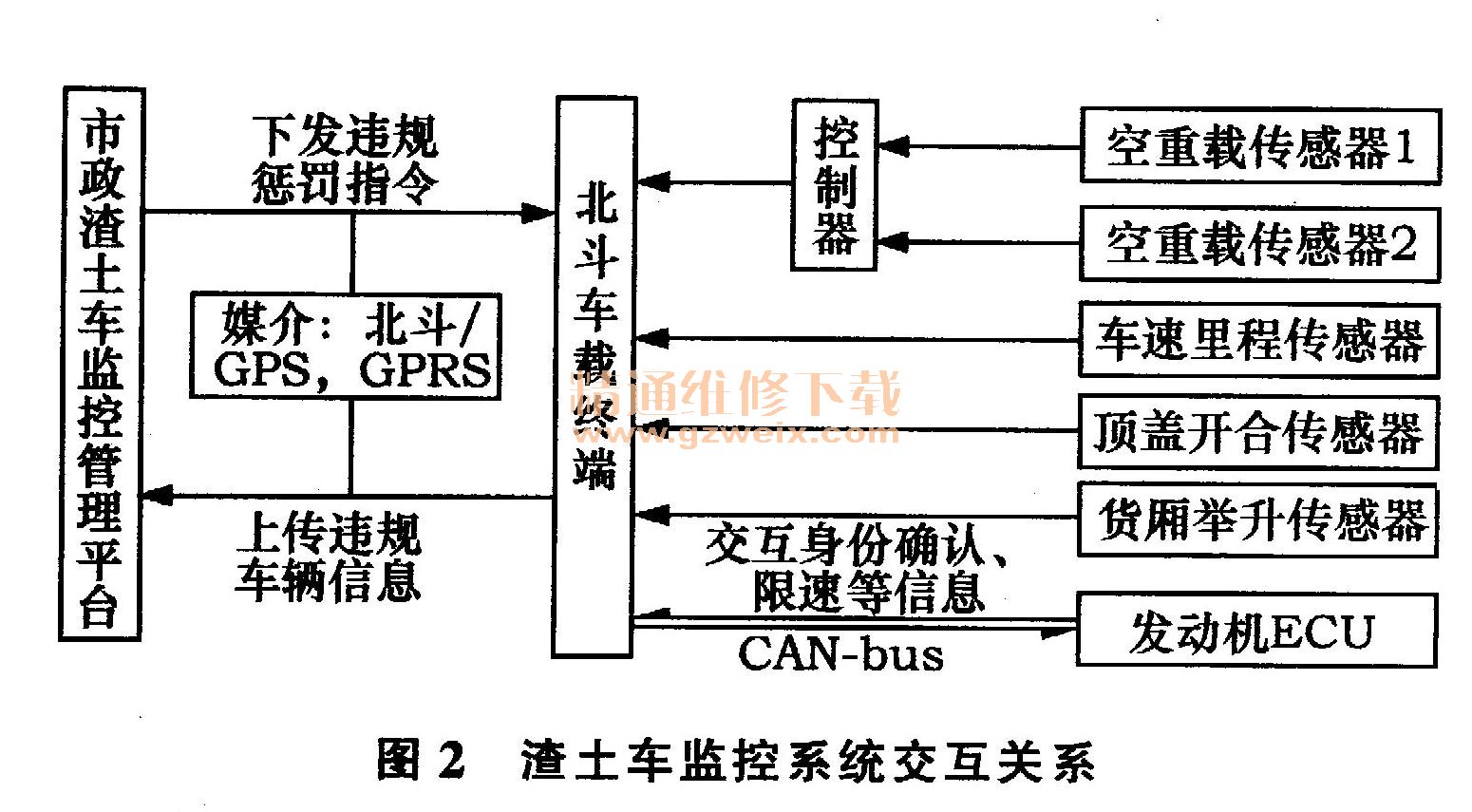
1)超速限制车载终端检测到车速超过限制要求,语音持续播报“您已超速”提示,直至速度合适;若车速持续超过限制速度60s,则对车辆进行限速,同时将超速车辆信息发送至渣土车监控平台进行备案处理。
2)重载密闭顶盖开启当渣土车满载时,若密闭顶盖未遮盖,终端语音播报“顶盖未密闭,请停车检查”,报警5 min,每分钟一次。若仍未遮盖,则对车辆进行限速,同时将违规车辆信息发送至渣土车监控平台进行备案处理。
3)未按指定路线行驶当终端检测到车辆偏离行驶路线,语音播报“您已偏离路线”,报警5 min,每分钟一次。若仍未回归,则对车辆进行限速,同时将违规车辆信息发送至渣土车监控平台进行备案处理。
4)未按指定时间行驶当终端检测到车辆未按指定时间行驶时,则对车辆进行限速,同时将违规车辆信息发送至渣土车监控平台进行备案处理。
5)随意倾倒当终端通过GPS检测到车辆未按指定范围倾倒渣土时,语音持续播报“禁止倾倒”,对车辆进行限速,同时将违规车辆信息发送至渣土车监控平台进行备案处理。
6)私自拆卸终端车辆发动机ECU与车载终端持续交互发送心跳CAN报文,确认车载终端的存在。若发动机ECU持续超过30 min未接收到心跳CAN报文,则认为车载终端被拆除,发动机ECU主动对车辆进行限速处理。
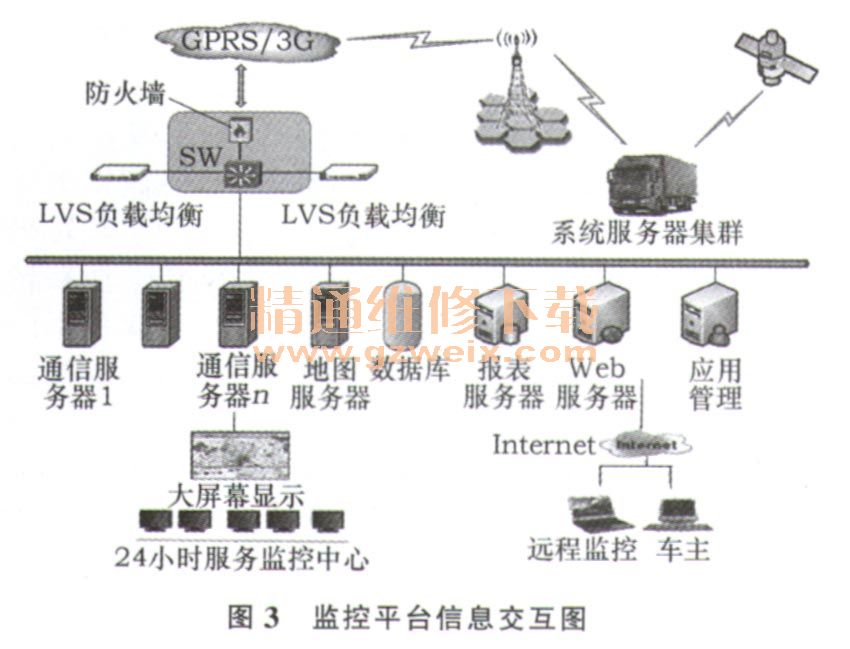
7)监控平台强制指令监控平台发现车辆严重违规,车辆被盗或者其他严重状况时,可以下发强制指令,对车辆进行限速,甚至断电处理。监控平台信息交互如图3所示。
")
")
")
")

