・上一文章:基于多元线性回归法估算车辆外部环境温度
・下一文章:为挤奶设备配套的旋片式真空泵的主要尺寸和参数关系的探讨
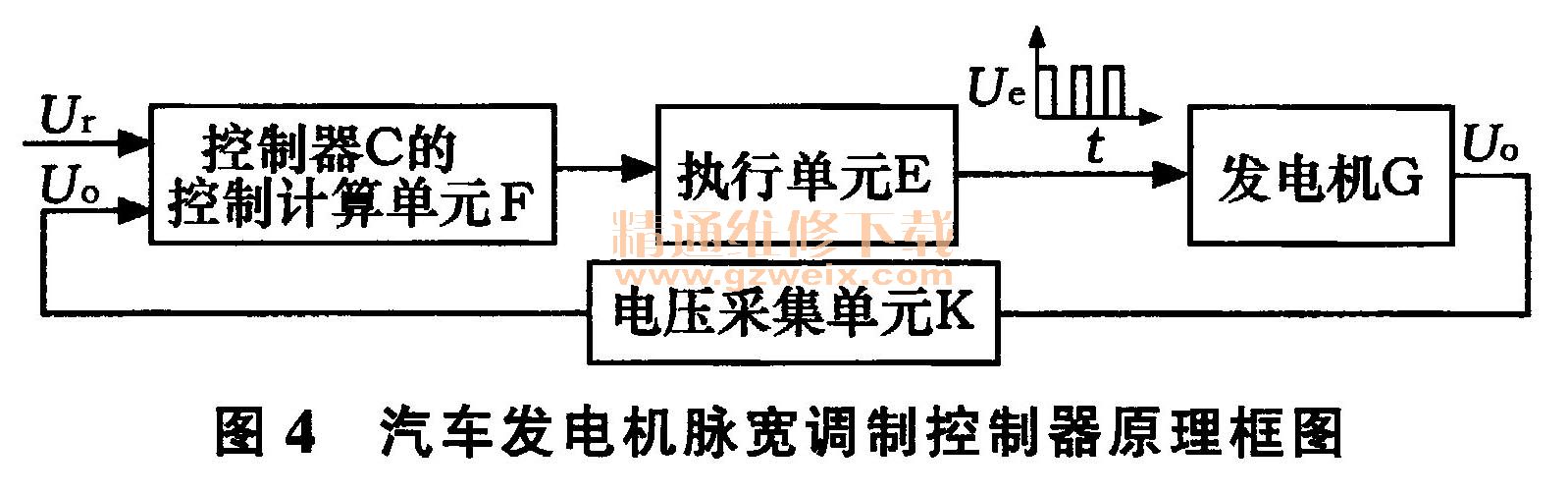
3 脉宽调制占空比计算
图4为利用脉宽调制控制方法来控制发电机的原理框图。
PID控制中,占空比如式(3)所示

由发电机电压控制模型可以看出,为了完成对发电机电压的控制,其中主要的问题是确定PID控制模型中参数,用以计算占空比a。
发电机内部电气模型复杂,需要考虑电磁转换等因素很多,并不适合于本文对于汽车发电机的研究。因此,为了简化模型,将发电机主要分为两个部分:励磁部分和电磁感应部分。
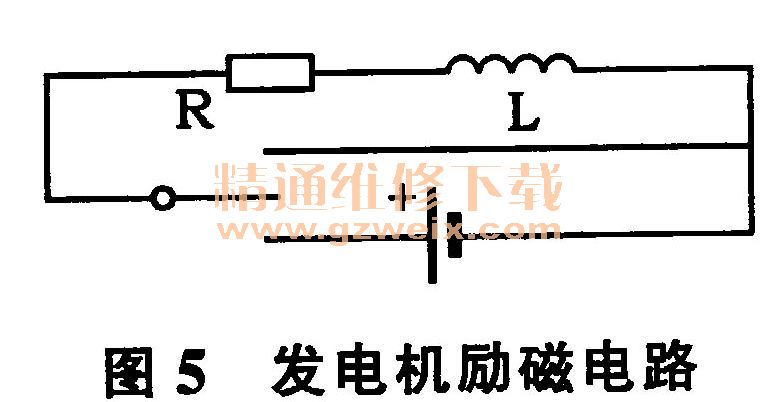
发电机励磁电路为RL电路,如图5所示。
电路的微分方程为

经过拉普拉斯变换可以得出传递函数为

由此将励磁过程简化为一阶过程,根据发电机铭牌电阻R取2Ω,根据相关研究电感L取7 mH。
电磁感应部分作为黑箱模型,采用试验法得出发电机外特性曲线,根据曲线和发电机铭牌拟合出发电机模型。发电机励磁感应部分采用正弦函数发生器、发电机输出外特性曲线藕合而成。
发电机励磁部分、电磁感应部分并且综合式(3)和式(5)构成完整的发电机控制模型,可以在相关软件中进行仿真计算。
采用一般PID参数整定方法,得出当K、=100时电路达到振荡临界状态,根据Ziegler-Nichols经验公式,PID选取参数如下
KP 60,K1=50,KD=12 (6)
采用上述参数再次进行仿真,输出电压结果如图6所示。
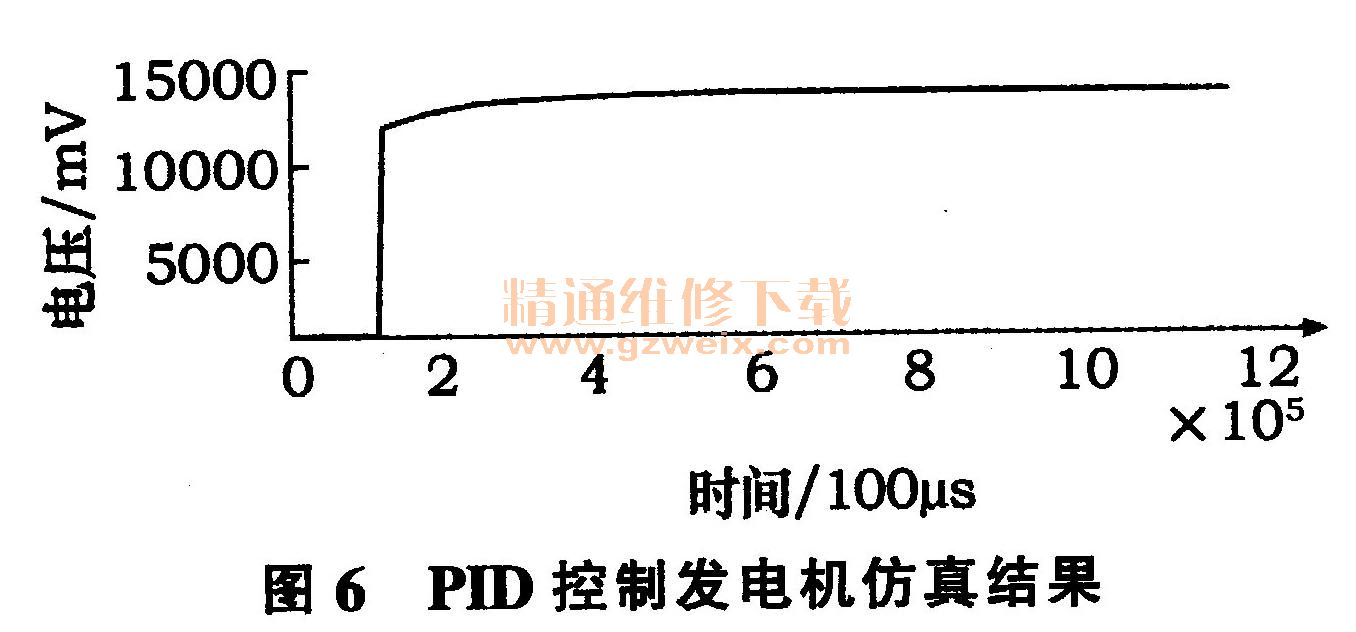
发电机输出电压能够稳定,并且电压波动很小,为20 mV左右。
当出现发电机刚刚开始运转等情况时,发电机实际输出电压与发电机要求的输出参考电压往往相差很多,此时若采用PID方法进行计算,则容易出现调节过快,发电机直接满载运转,对发动机造成负载突变。因此,提出式(7)控制策略进行控制。
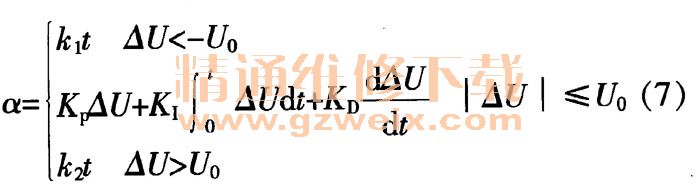
其中:k1=1,k2=-1,Uo=0.5U。
电压控制单元获得参考电压和实际电压之后,判断目前发电机电压与参考电压之间的电压差值。如果电压差绝对值大于0.5V,则线性改变占空比,线性改变励磁线圈电流大小,以免积分运算累积差值过大;当电压差绝对值小于0.5V时,采用PID算法进行占空比实时计算。
鉴于整体算法的实现不是连续型算法,因此需要使用的是数字PID算法。经典算法如式(8)所示。

由于积分项的存在,如果采用经典数字PID算法,则需要非常大的存储空间用于历史数据的存储。由于本文所述发电机控制器在单片机上实现,为了节约数据存储空间,采用增量式进行计算。
式(8)为某一时刻k所计算得到的占空比的结果,而上一时刻k-1,占空比计算如式(9)所示。

将式(8)与式(9)相减,得

则第k次所需的占空比为

采用增量法进行计算后,只需分配有限空间进行变量存储,即参考电压与实际电压的最近3次差值,△Uk,△Uk-1,△Uk-2。在获取参考电压Ur与实际电压Uo后,计算最新差值△Uk=Ur-Uo,利用已存的前两次差值,如式(10)进行增量的计算,进而如式(11)完成对占空比的计算,然后进行差值更新,保证下次运算正确性。根据物理意义可知,占空比大小在0~100%范围内,因此需要加人如式(12)限位,控制占空比大小在正常可控范围内。

ao为最终输出可用的占空比。
")
")
")
")

