2 ESP系统组成及控制原理
在高速转弯或在湿滑路面上行驶时,ESP电子稳定程序提供最佳的车辆稳定性和方向控制。电子控制单元
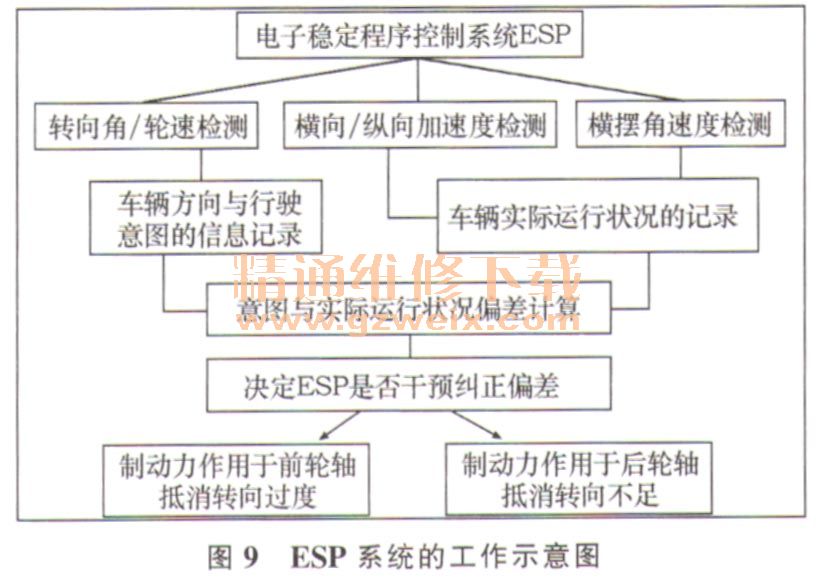
ECU通过转向盘转角传感器确定驾驶员策划的行驶方向;通过纵向加速度传感器、横向角速度传感器、横摆转角传感器和轮速传感器获得的信息来计算车辆实际行驶方向。当电子稳定程序控制系统检测到车辆行驶轨迹与驾驶员要求不符时,ESP会利用牵引力控制系统能掌控发动机转矩增减功能,向发动机控制模块ECM发送串行数据通信信号,请求减小发动机输出转矩。若ESP依然检测到车轮侧向滑移,则ESP根据从外部作用于车辆上的各种力(制动力、推动力或任一侧向力)皆会使车辆环绕其重心转动的原理,通过对前后桥一个以上的车轮实施制动干预,即时克服转向不足或转向过度的风险,确保车辆恢复到稳定的行驶状态和遵循正确的行驶轨迹,安全行车。ESP的干预措施除对车轮独立地施加制动力外,还包括在特殊工况下对变速器的干预措施;通过发动机管理系统减小发动机的输出转矩。
2.1 ESP系统组成
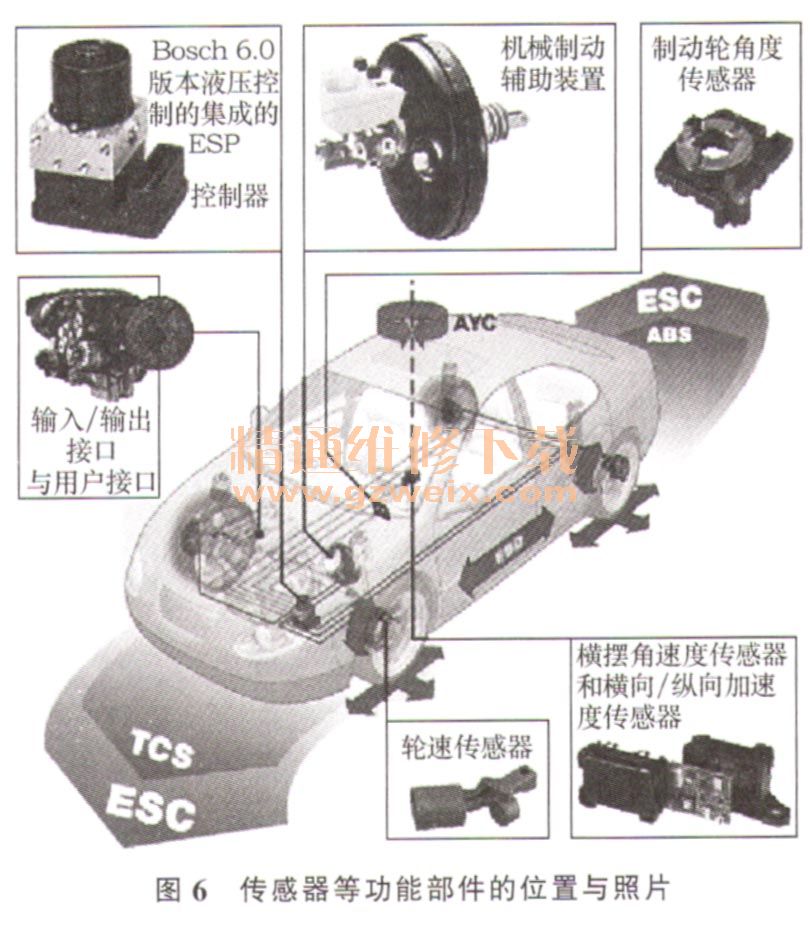
ESP系统由电子控制单元、转向盘转角传感器、轮速传感器、横摆角速度传感器、横向角速度传感器及
液压系统等组成。ESP控制系统传感器位置及各功能部件示意分别如图5、图6所示。它除了具有
ABS与TCS的功能,还是一种智能的主动安全系统,利用智能化控制制动力驱动力实现安全平稳高效的行驶。有效防止车辆在高速行驶时转弯或制动过程中因失控而酿成灾祸。

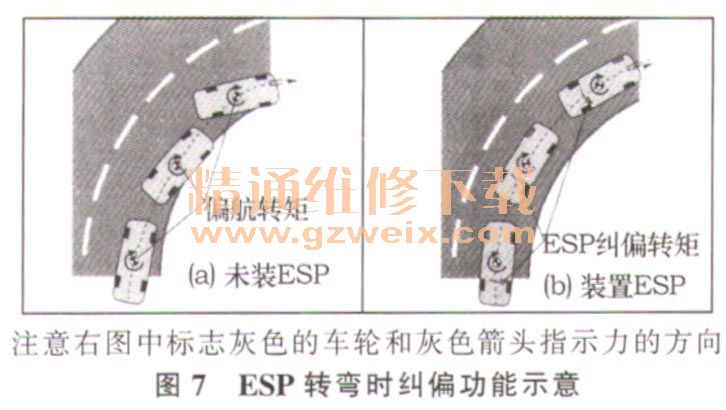
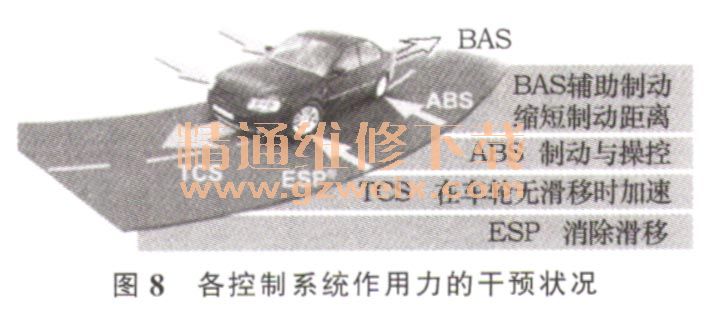
ESP转弯时纠偏功能示意如图7所示。图7a所见,未装配ESP车辆后轮侧滑,出现甩尾和转向过度现象。图7b装置ESP系统则能通过制动系统对内前轮施加一制动力,由此产生一逆时针的转矩,纠正偏离正确的行驶轨迹,保证车辆稳定性。图8表示了各控制系统作用力的干预状况。ESP系统工作示意图如图9所示。
 2.2 ESP控制原理
2.2 ESP控制原理
ESP的程序软件设计蕴含较为复杂的计算机控制技术,即稳定在算法。需先对状态参数变量进行恰当准确的估算,结合车辆动力学仿真软件进行仿真和验证,为ESP控制策略提供模型和数据依据。软件程序通过
ECU开展前后左右车轮的制动力和驱动力,确保车辆的侧向稳定性。
ESP主要是针对大的侧向加速度和大的侧偏角的极限工况来工作。它利用控制左右两侧车轮的制动力或驱动力之差产生的横摆力矩来预防出现可能失控的侧滑现象,保证车辆的路径循迹跟踪能力,提高车辆在高速行驶时的安全性。
2.3 ESP控制特点
1)主动干预。
ABS等安全技术是对驾驶员主导的操作进行响应、配合和辅助的干预,而且不能调控发动机。而ESP依靠的是高频率实时检测的传感器,由
ECU主导,通过主动调控发动机转速转矩,并可调整每个车轮的驱动力和制动力,来修正汽车转向不足和转向过度,确保稳定安全行驶。
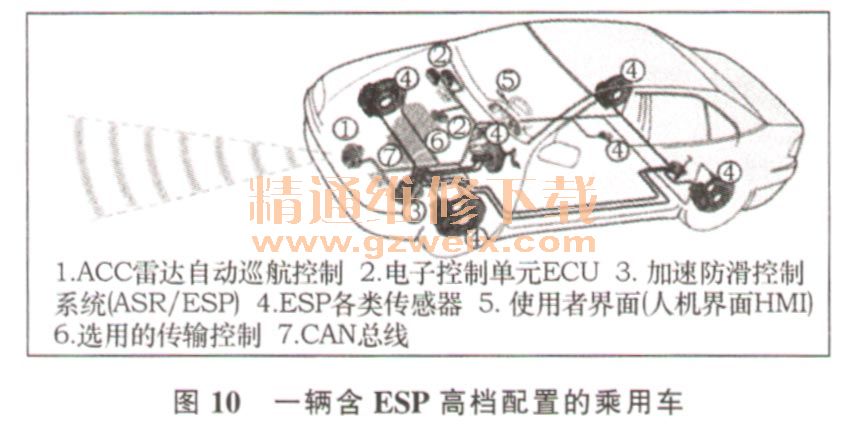
2)实时监控。ESP能以25次/s的高频率实时监控驾驶员的操控动作、路面反应、车辆运行工况,并可及时向发动机管理系统和制动系统发出指令。一个完备的ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪、周围环境识别、综合稳定控制和制动助力(BAS)等9项功能,见图10。
3)通过CAN完善控制功能。ESP的
ECU与发动机传动系的
ECU通过CAN互联,使其能更高速有效地发挥控制功能。自动变速器将即时的机械传动比、液力变矩器的变矩比和档位等信息传递给ESP,以估算驱动轮上的驱动力。如对后轮驱动的车辆常易出现转向过度,致使后轮失控而甩尾,ESP便会预先慢刹外侧前轮来稳定车辆;而当转向不足时为了校正循迹的方向,ESP会慢刹内侧后轮来纠正行驶方向。
4)事先预警。当驾驶员操作不当或路面异常时,ESP会用警告灯或电子显示屏警示驾车者。ESP是一类既能控制驱动轮又能控制从动轮的牵引力控制系统。当ESP识别出行进在低附着系数的路面时,会禁止驾驶员挂低档。在这类路面上起步时,ESP会告知传动系,
ECU应挂入2档,不仅确保了安全,也显著改善大功率轿车起步的舒适性。
上一页 [1] [2] [3] [4] 下一页
")
")
")
")

