・上一文章:九洲DVC-7058型有线电视高清机顶盒不开机故障检修
・下一文章:“十六”步流程提高汽车车身维修质量
上期,我们介绍了ABS、ASR、打滑率、车速来源等内容,接下来我们再来聊聊车身稳定控制系统控制原理。
5.车身稳定控制系统原理
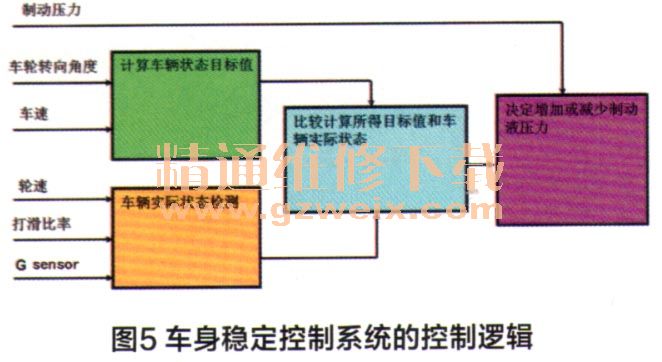
对于车身稳定控制系统的原理,各车厂或供应商的说法各异。根据笔者的理解,简而言之:车身稳定控制系统模块借助方向盘转向信号和车速信号计算出合理的车身惯性目标值,根据惯性、轮速传感器检测到实际的车身姿态,两者进行对比后,通过对动力输出进行修正或采取额外的制动调节,达到稳定车身姿态的控制。其控制逻辑,如下图5所示。
从常规意义来讲,我们常说的车辆不稳定的状态多是指横向(侧向)方面的不稳定,其常见表现形式有转向不足和转向过度两种。简单理解,转向不足就是“转不过来了”,转向过度就是“转过头了”。图6所示为转向不足和转向过度的效果图。

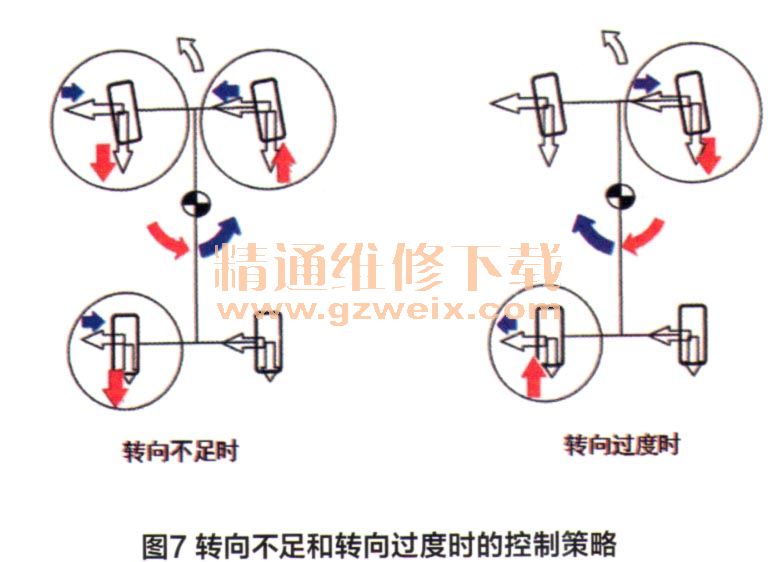
车辆出现转向不稳定的状态时,车身控制模块将采取不同的控制策略。转向不足时,系统就会增加内侧的制动力,以减小转向半径;转向过度时,系统会增加外侧的制动力,以增大转向半径。增加向前的扭矩是减小制动,增加向后的扭矩是增加制动力。图7所示的是车身稳定控制系统的控制策略。
当车辆出现不稳定状态时,车身稳定控制系统就会控制相关的电磁阀对各个车辆的制动压力进行调节,从而达到车身行驶稳定的目的。
常见的车身稳定系统一般有12个电磁阀分别控制液压阀体中的机械阀,进行制动油压调节。每个车轮上的制动分泵分别对应一个常开的进口阀(IN)和一个常闭的出口阀(OUT),这样4个车轮就需要8个电磁阀(图8)。因为常规的汽车制动系统,从总泵分出来的是两组制动管路,总泵上的每条制动管路为两个车轮提供制动压力,或为前后布置形式、或为“X”型布置形式。为了实现压力保持以及一些辅助功能(如坡道起步),在总泵后的每条制动管路上,又分别设置了一个常开的吸压阀和一个常闭的切断阀。具体的液压管路设计(仅以刹车总泵的一条管路为例),如图9所示。


此外,车身稳定控制系统实现的功能,远比ABS和ASR系统复杂。从上面介绍的控制原理及控制逻辑来看,对控制模块软件进行简单的升级是不可能实现这些功能。要实现这些功能,就必需要知道的驾驶员意图和实际车辆姿态,这样才能去对比目标和实际状态的差异,以便控制输出的制动压力。
因此,从系统配置来讲,要想车辆实现车身稳定控制系统的功能,除了装备ABS系统所需的轮速传感器外,还必须有方向盘转角传感器和惯性传感器。
")
")
")
")

