・上一文章:奥迪A8L发动机故障灯亮、加速不良
・下一文章:2013款雪佛兰科帕奇遥控器匹配
三、百斯巴特车轮定位仪使用方法
1.车辆定位角度和相关术语基本知识
车轮和车身包含如下角度:车辆的几何轴线、车辆中心对称面、驱动偏角、前束、外倾角、主销内倾角、主销后倾角、转向时负前束、后轮偏位、轮轴偏移、轴距偏差、横向偏位、最大总转角、轨迹宽度偏差、后轴偏位。
(1)车辆的几何轴线(图3)。
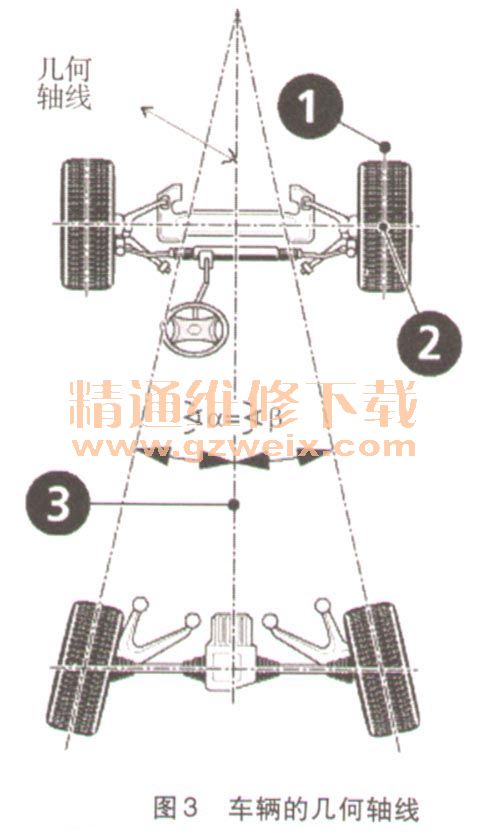
定义:
①车轮中心线:是轮胎上对车轮轴垂直的中心线。
②车轮接触点:是车轮中心线与车轮轴的交点。
③几何轴线:是后轴总前束的角平分线。后轴的前束是以前面中心对称面为基准测出的。
意义:车辆的几何轴线由后轴前束决定,它是车辆行驶时的推力线,也是前轴前束的测量基准。
应用分析:后驱车辆是由后轮推动前轮行进的,因而前轴前束和后轴前束是相互关联的,后轴前束决定了前轴前束是如何平分的。
在检测过程中正是遵循了以下过程:
车辆中心对称面卜后轴前束卜几何轴线卜前轴前束,这些角度都是第一次打正方向后自动测出。
(2)车辆中心对称面(图4)。
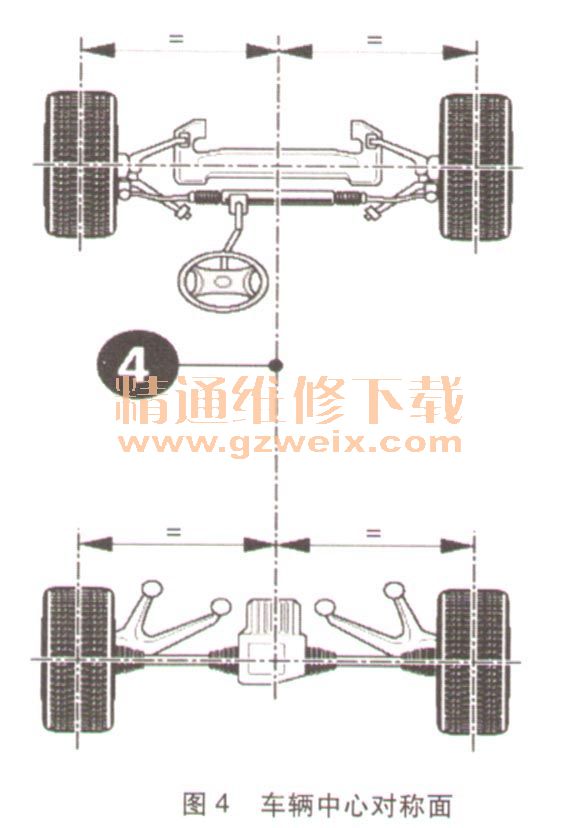
定义:车辆中心对称面是汽车几何中心平面,它垂直于行驶平面并通过前后轴的轮距中点。
意义:它是后轴前束的测量基准。
应用分析:在定位仪调整前检测第一次打正转向盘时测出。
(3)车辆的驱动偏角(图5)。
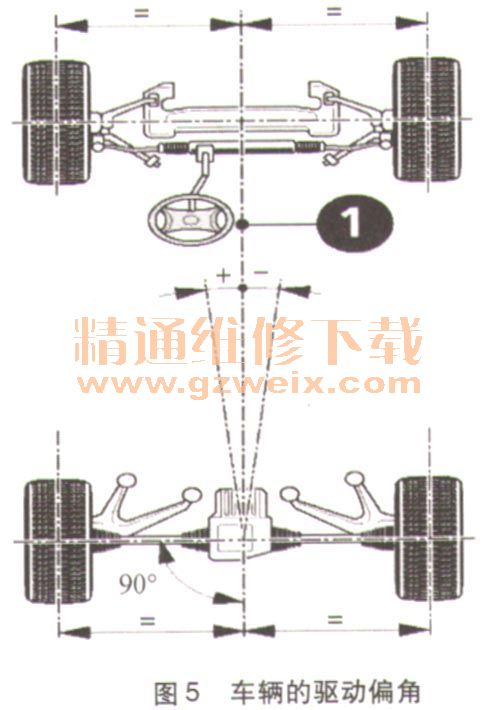
定义:驱动偏角是车辆中心对称面与几何轴线所形成的夹角。
意义:它是由后轴的前束、横向偏移和斜向偏位产生的。汽车按照几何轴线方向行驶。
(4)车轮前束(图6)。
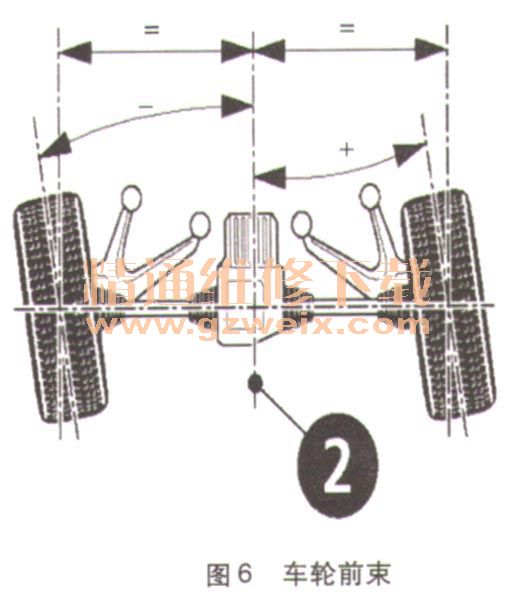
定义:车轮前束可分为单独前束和总前束。
①总前束:一个轴上的总前束由两个车轮的前束角之和计算得出。
②后轴的单独前束:指车辆中心线与车轮中心线的夹角。调整后轴前束时,是调整这个夹角。
③前轴的单独前束:指几何轴线与车轮中心线的夹角。调整前轴前束时,就是调整这个夹角。
意义:正确的前束角与外倾角配合能够减少车辆行进时对轮胎的磨损。它补偿了由于车轮外倾角使得地面对轮胎产生的侧向力,使驾驶稳定。
应用分析:当后轮的前束值不相等时,会引起车辆几何轴线发生偏转。由于车辆在行进中,是后轴推动带有转向的前轴前进。在直线行驶过程中,前轮根据几何轴线打正方向。后轴车轮和后轴本身的变化会引起前轴原来的前束值不相等,使车辆的行驶方向发生偏斜。
如果强制车辆按照几何轴线行驶,会使轮胎受力不均,加速轮胎的磨损。所以,我们在定位过程中必须根据后轴前束形成的几何轴线将前轴的前束调整到合格范围内。
(5)车轮外倾角(图7)。
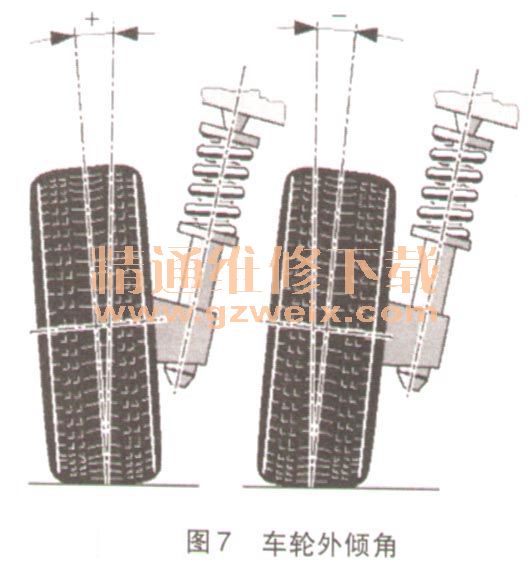
定义:外倾角是车轮中心平面与垂直面间的夹角。转动力向,外倾角会相应变化。后轮外倾角是在方向直前,根据中心平面测出。奔驰公司规定前轮外倾角是前轮前束为“0”时测得的数值。
意义:外倾角与主销内倾角构成主销偏距。合适的主销偏距使车辆易于驾驶,既可以减小路面的冲击,又可以使转向盘有很好的回正能力。
应用分析:外倾角负方向过大,由于车辆速度快和轴载高使轮胎过热导致受损。外倾角正向过小,降低转向行驶的性能。
(6)车轮内倾角(图8)。
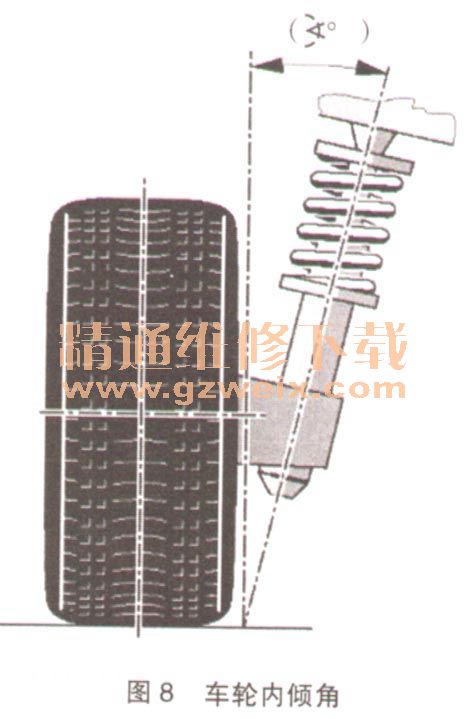
定义:主销是指车轮旋转围绕的轴线,主销内倾角是指主销向内倾斜与铅垂线间的夹角。
意义:外倾角与主销内倾角构成主销偏距。合适的主销偏距使车辆易于驾驶,即减小路面的冲击,又保持很好的回正能力。
应用分析:定位在第一次对中后,向左右打20°转角时测得。内倾角过大:转向力与制动反力过大。内倾角过小:转向装置回复能力差,车轮容易受损,倾斜。
(7)主销后倾角(图9)。
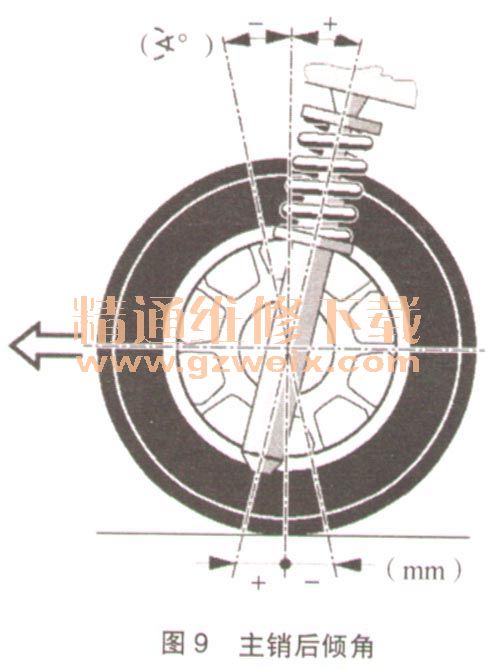
定义:主销后倾角是转向旋转轴与车轮轴中垂线的夹角。
意义:正的后倾角保证车轮是被拉动的而不是推动的。保证车轮在行进中能够直线行驶,提高了车轮在行进中的自定心能力。尽量减小地面对驾驶的冲击。主销后倾角为正与车轮前束配合使车轮行进时保持稳定。
应用分析:主销后倾角也是在打20°时测得。
主销后倾角为正:方向控制能力与制动力增强。
主销后倾角为负:转向复位能力变差,易损坏轮胎,造成轮胎打滑,对方向过于敏感。主销后倾角不等容易引起车身倾斜。
调整顺序:先调整后轴再调整前轴。对于单个轴,先调整主销后倾角和外倾角,再调整前束角。
原因:调整主销后倾角时会使前束角度变化。而调整前束时不会影响主销角度和外倾角。
(8)转向时负前束(图10)。
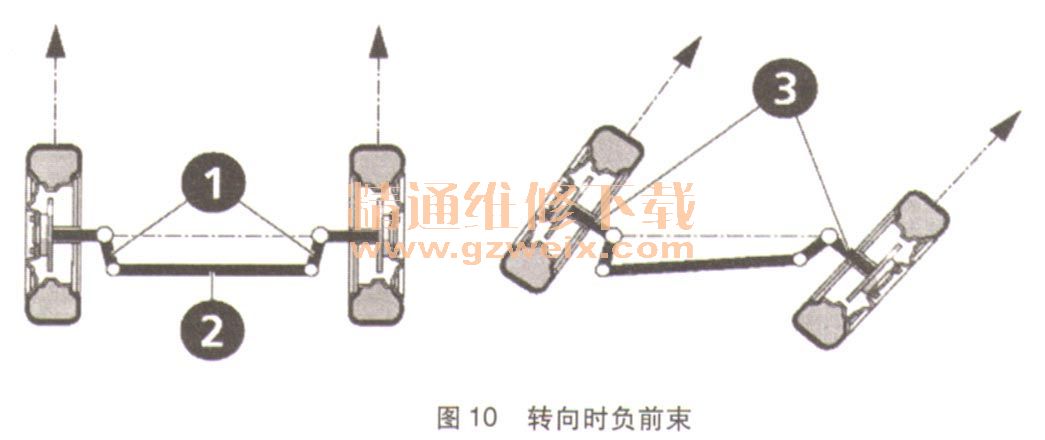
定义:转向梯形臂:前轴3、转向臂1和横拉杆2一起组成转向梯形。它可以在转向时形成不同的转向角。
意义:车辆直线行驶时,横拉杆平行于前轴,转向时横拉杆不再平行于前轴。
定义:转向时负前束是指转向时内轮相对外轮的前束差值。
意义:转向负前束表示当向左右转向时,转向梯形臂的工作状态。通过转向时负前束的测量值,可以判断梯形是否变形。
应用分析:在左右打20°时测出该角度。如果电子转角盘损坏,该角度在打10°方时测出。
(9)最大总转角(图11)。
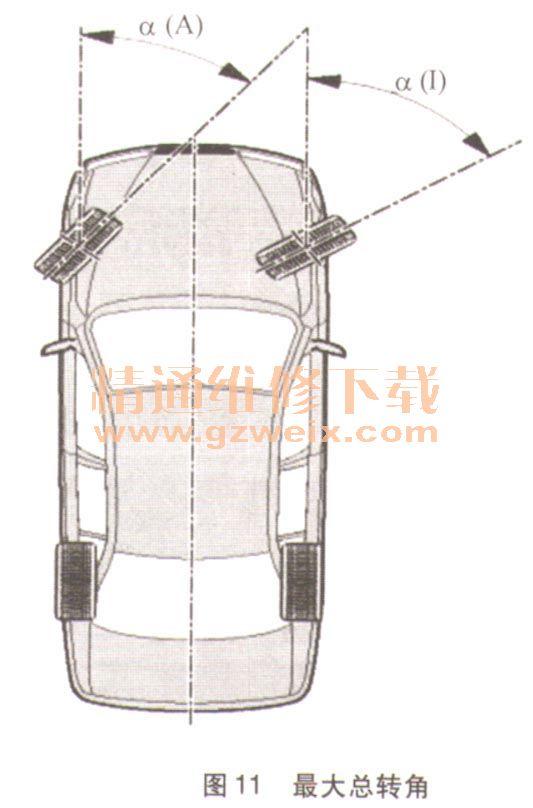
定义:最大总转角是分别向左右最大转向时,内侧车轮和外侧车轮中心线与车辆中心线的夹角。
意义:通过左右的最大转向角可以判断车的横拉杆即球头工作是否正常。横拉杆左右分布是否平均。
应用分析:通过电子转角盘测出此角度。如果电子转角盘损坏,该角度不能被测出。
(10)轮轴偏移(图12)。
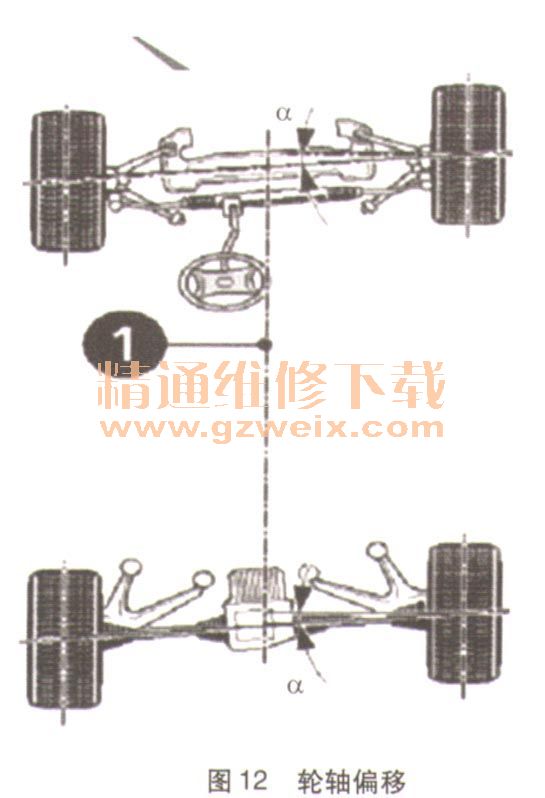
定义:轮轴偏移是指两个前轮(或后轮)与地接触点的连线,与几何轴线的垂线间的夹角。当右轮在左轮前方时此角度值为正,在左轮后方时此角度为负。
(11)轴距偏差(图13)。
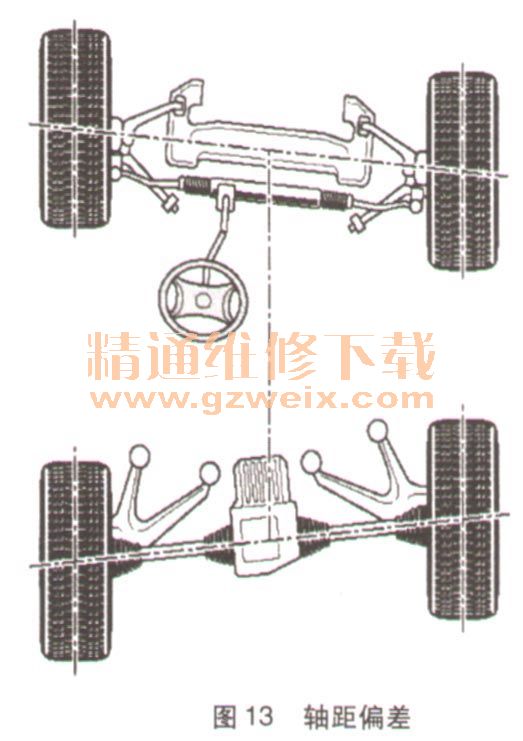
定义:轴距偏差是两个前轮之间的连线与两个后轮间的连线所形成的夹角。当右侧轮距大于左侧轮距时,此角度为正,反之为负。
(12)横向偏位(图14)。
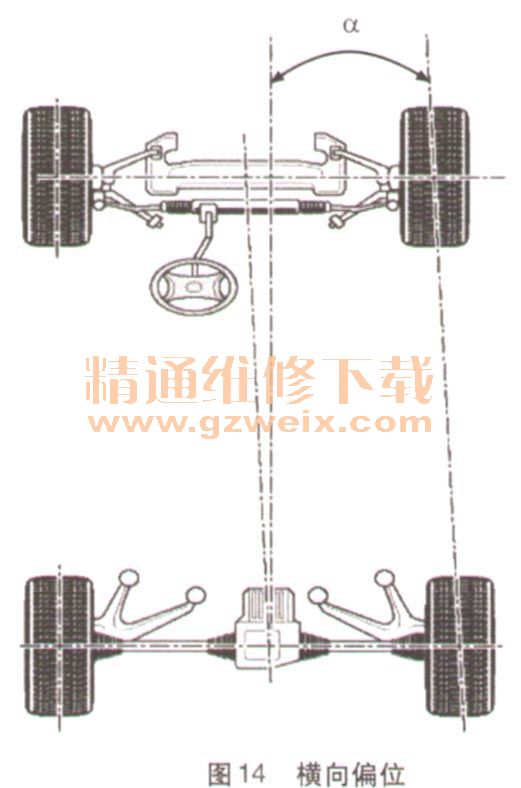
定义:横向偏位是指左侧或右侧前轮和后轮与地接触点连线与几何轴线间夹角,如果后轮超出前轮,此角度为正。
(13)轮迹宽度偏差值(图15)。
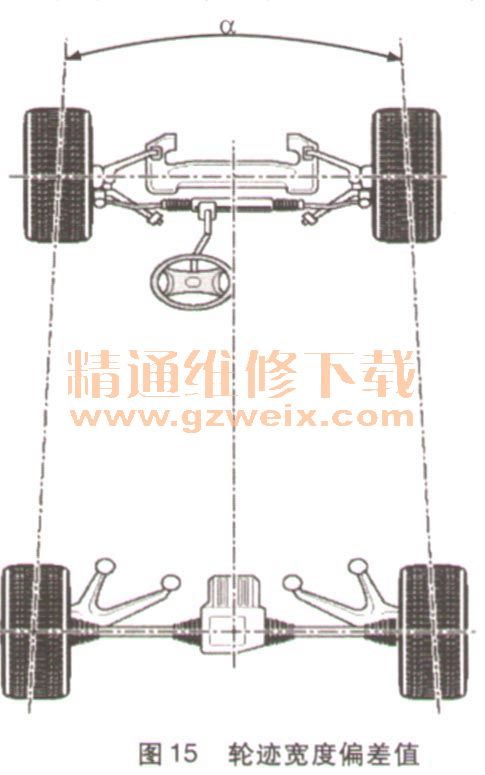
定义:轮迹宽度偏差是指左前轮和左后轮与地面接触点之间的连线同右前轮和右后轮与地面接触点之间连线的夹角。当后轴宽度超过前轮宽度时,此角度为正。
")
")
")
")

