5. 永磁磁阻同步电动机
(1)永磁磁阻同步电动机的结构 永磁磁阻同步电动机是将永久磁铁取代池励同步电动机的转子励磁绕组,将磁铁插入转子内部,形成同步旋转的磁极。电动机的定子与普通同步电动机两层六极永磁磁阻同步电动机的定子和转子一样,转子上不再用励磁绕组、集电环和电刷等来为转子输入励磁电流,输入定子的是三相正弦波电流,这种电动机称为永磁磁阻同步电动机。
永磁磁阻同步电动机具有高效率(达97%)和高比功率(远远超过1kW/kg)的优点。抽出转矩与转动惯量比都大于相类似的三相感应电动机。在高速转动时有良好的可靠性,平稳工作时电流损耗小,永磁磁阻电动机在材料的电磁性能、磁极数盈、磁场衰退等多方面的性能都优于其池种类的电动机,工作噪声也低。
在同步电动机的轴上装置
转子位置传感器和速度传感器,它们产生的信号是驱动控制器的输入信号。永磁磁阻同步电动机具有功率密度高、调速范围宽、效率高、性能更加可靠、结构更加简单、体积小的优点。与相同功率的其池类型的电动机相比较,更加适合作为EV、FCEV和
混合动力汽车的驱动电动机。
永磁磁阻电动机为了增加电动机的转矩,采用增加q轴磁阻与d轴磁阻之差,来获得更大的磁阻转矩,因此采用多层的转子结构,如图22所示。有单层、双层、3层和10层等,用于优化转子结构。转子的层数增加,Lq-Ld也增大,但增加层数超过3层,Lq-Ld变化不大,一般为2~3层。

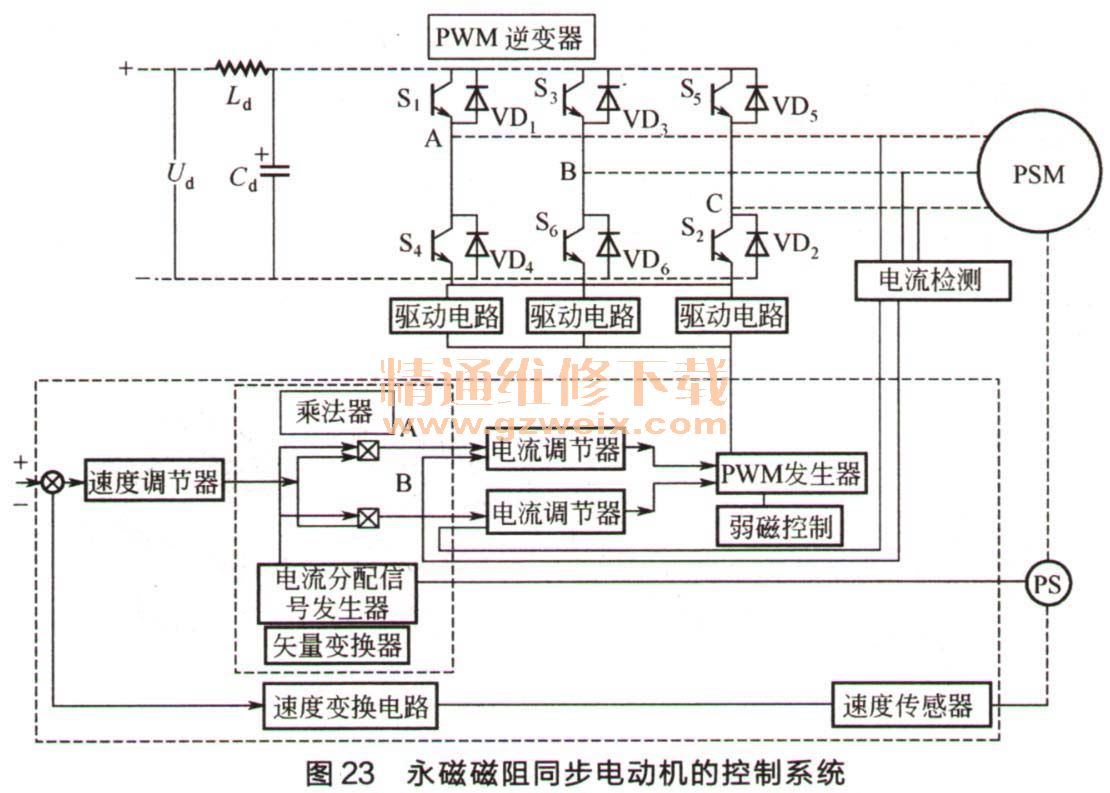
(2)永磁磁阻同步电动机的控制系统 永磁磁阻同步电动机采用带有矢量变换电路的逆变器系统来控制,其控制系统由直流电源、
电容器、三相绝缘姗双极晶体管IGBT逆变器、永磁同步电动机PSM、电动机转轴位置检测器PS、速度传感器、电流检测器、驱动电路和其池一些元件等共同组成。微处理器控制模块中包括乘法器、矢量变换电路、弱磁控制器、转子位置检测系统、速度调节系统、电流控制系统、PWM发生器等主要电子器件,PWM逆变器的作用是将直流电经过脉宽调制变为频率及电压可变的交流电,电压波形有正弦波或方波。
①转子位置检测器根据检测转子磁极的位置信号和矢量变换电路发出的控制信号,共同通过电流分配信号发生器来对转子位置信号进行调节,产生电流分配信号,将信号分别输入A、B乘法器中。
②速度传感器、速度变换电路和速度调节器,对电动机的运行状态进行判别和处理,将电动机的运行状态信号分别输入A、B乘法器中。
③控制驱动器采用不同的控制方法,由电流分配信号发生器和速度调节器对系统提供信号,经过乘法器逻辑控制单元的计算后产生控制信号,并与电流传感器输入的电流信号,共同保持转子磁链与定子电流之间的确定关系,将电流频率和相位变换信号,分别输入各自独立的电流调节器中,然后愉出到PWM发生器中,控制逆变器换流IGBT开关元件的通断,完成脉宽调制,为永磁同步电动机提供正弦波形的三相交流电,同时控制定子绕组的供电频率、电压和电流的大小,使永磁同步电动机产生恒定的转矩和对永磁同步电动机进行调速控制。
④系统的给定量是转子转速的大小,系统可以根据不同的给定速度运行,调速范围宽,调速精度也较高。根据电动机转子位置检测器测得的转子的正方向转角θ位置的信号DA、DB、DC,使分别属于上桥臂和下桥臂的两只开关元件导通,而且只有在下桥臂的开关元件受控于PWM状态时,电动机处于电动状态运转。
根据电动机转轴位置检测器得到的转子反方向转动的信号DA'、DB'、DC时,分别属于上桥臂和下桥臂的6只开关元件按周期规律交替导通,在每个周期中每只开关元件轮流导通工作60°电角度,PWM处于脉宽调制状态时,电动机处于发电状态运转。永磁磁阻同步电动机的控制系统如图23所示。
(3)永磁磁阻同步电动机的机械特性永磁磁阻同步电动机在牵引控制中采用矢量控制方法,在额定转速以下恒转矩运转时,使定子电流相位领先一个β角,这样,一方面可增加电动机的转矩;另一方面由于β角领先产生的薄弱作用,使电动机额定转速增高,从而增大了电动机在恒转矩运转时的调速范围,如β角继续增加,电动机将运行在恒功率状态,永磁磁阻同步电动机能够实现反馈制动,图24所示为永磁磁阻同步电动机的机械特性曲线。

上一页 [1] [2] [3] [4] [5] [6] 下一页
")
")
")
")

