・上一文章:新途观组合仪表防盗匹配后为何存储故障码U110000
・下一文章:上汽大众车系诊断思路(四)
六、车身电器系统
1.网络连接
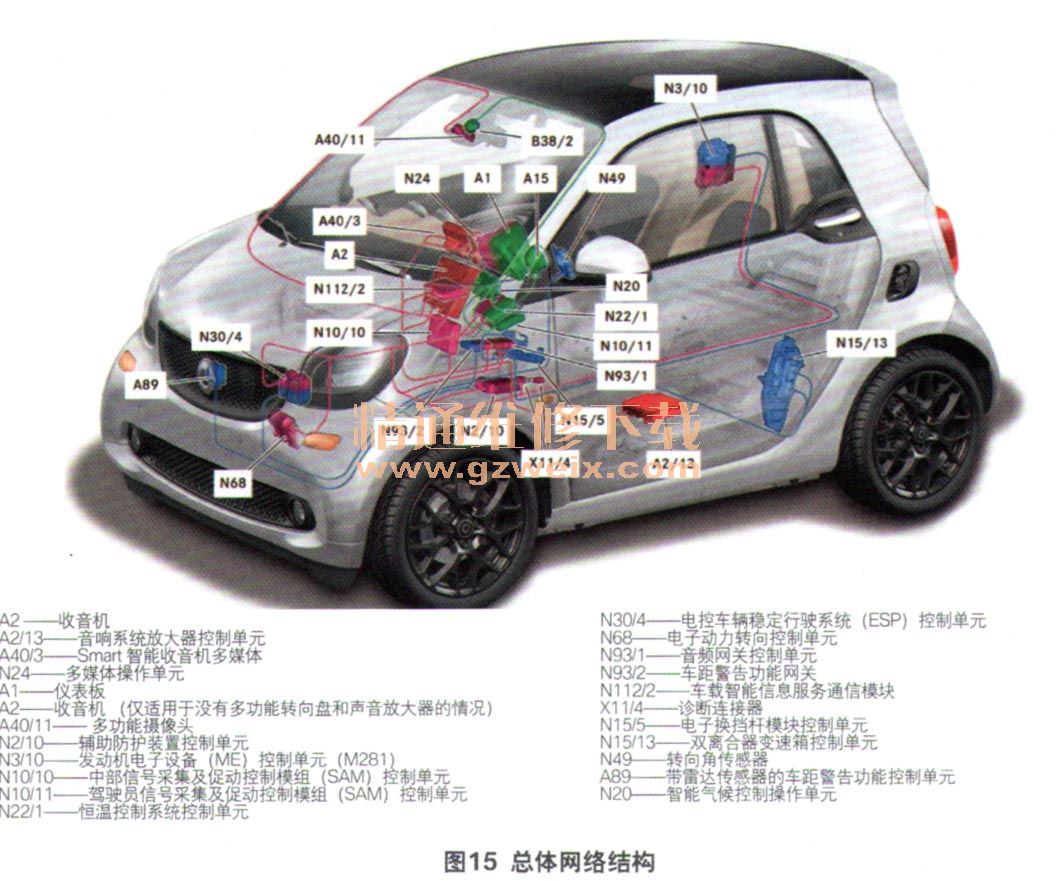
在新款smart fortwo中,车辆电子系统的网络连接是通过以下数据总线系统实现的:车载智能信息系统控制器区域网络 (CAN)、车内控制器区域网络(CAN)、传动系控制器区域网络(CAN)、底盘控制器区域网络(CAN)、前部控制器区域网络(CAN)、空调操作局域互联网(LIN)、雨量/光线传感器局域互联网(LIN)和辅助仪表局域互联网(LIN)。
新款smart fortwo的总体网络布局如图15所示,网络连接框图如图16所示。

2.自动启动/停止功能
为了减少车辆的燃油消耗和废气排放,新款smart fortwo配备了自动启动l停止功能。如果满足相关条件,则自动启动I停止功能在车辆停止时自动关闭发动机。重新起步时发动机自动重新启动。自动启动/停止功能的主控制单元是驾驶员信号采集及促动控制模组(SAM)控制单元。信号采集及促动控制模组(SAM)控制单元根据收到的传感器数据以及来自中部信号采集及促动控制模组(SAM)控制单元、电控车辆稳定行驶系统控制单元、智能气候控制系统控制单元或辅助防护装置控制单元的数据,促使发动机电子设备(ME)控制单元停止或启动发动机。启动/停止系统信息的输出设备是仪表盘。
3.驾驶辅助系统
新款smart fortwo中应用了有助于驾驶员安全驾驶、减轻驾驶员负担和提高驾乘舒适性的驾驶辅助系统。
(1)带限速器的定速巡航控制
新款smart fortwo配备了能够保持选定速度的定速巡航功能,以及能够帮助驾驶员不超过某个特定速度的附加限速功能。限速功能可通过多功能转向盘设置。
(2)侧风稳定控制辅助系统
侧风稳定控制辅助系统能够显著削弱强侧风对车辆直线行驶性能的干扰,从而辅助驾驶员。在这种情况下的车道偏移以及所需转向力会明显减少。 ESP系统现有的传感器也被用于识别侧风干扰。侧风稳定控制辅助系统在车速超过70 km/h时激活并能够在直线行驶或轻微转弯行驶时发挥作用。侧风干扰由通过ESP激活的单侧制动干预来抵消。
(3)车道保持辅助系统
车道保持辅助系统(LDW)通过车内后视镜区域内的一个摄像头识别到车辆已超过车道标志线(图17),然后警告驾驶员已经无意中离开了已识别的车道。警告通过声讯报警和仪表板中的光学反馈(Telltale)实现。车道保持辅助系统(LDW)在车速超过70 km/h时启用。
除此之外,新款smart fortwo的驾驶辅助系统还包括我们所熟知的轮胎压力监测、后部驻车辅助、后视摄像头和车距警告等功能。
")
")
")
")

