MKE程序集成在网关,如图15所示,ESP控制单元、电动助力转向控制单元通过驱动CAN将信号送至网关。MKE根据转向角传感器、加速踏板位置传感器、横向加速度传感器信号,分析驾驶人的动作特征。驾驶人清醒时总是以较小的幅度操纵转向盘,疲劳时开始握着转向盘不动,突然以大的幅度操纵转向盘。当驾驶动作经常中断,意味着驾驶人疲劳程度增加,MKE发出指令到仪表控制单元,做出报警。

2.比亚迪汽车公司将疲劳驾驶识别系统命名为BAWS,中文是疲劳驾驶预警系统。工作原理是基于驾驶人生理图像反应,利用驾驶人面部特征、眼部信号、头部运动性等推断驾驶人的疲劳状态,并进行报警提示,给予主动智能安全保障。
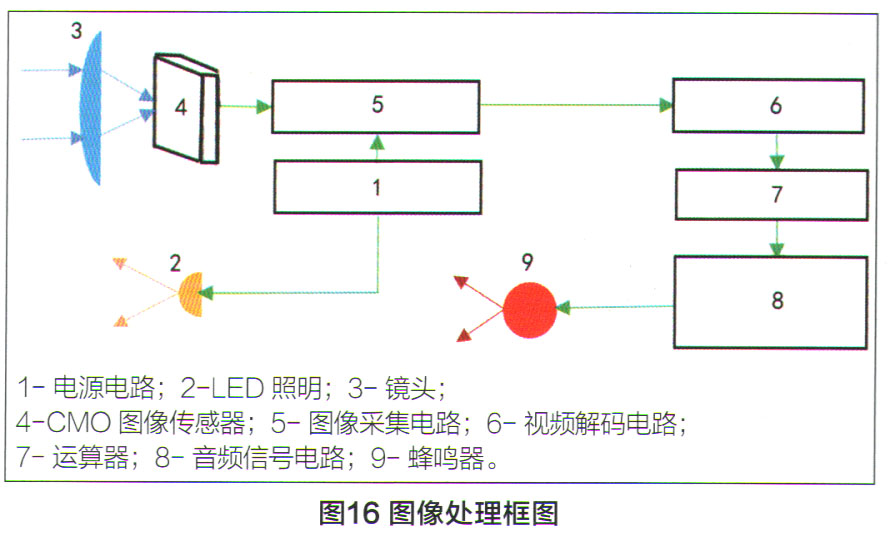
该疲劳驾驶识别系统主要由摄像头、BAWS模块、蜂鸣器、近红外LED等组成,摄像头安装在转向柱上方,摄像范围是驾驶人的面部,系统进行实时监控,近红外LED照明增强摄像清晰。图像处理如图16所示,车辆行驶过程中,驾驶人闭眼时间或没有目视前方的时间,超过设定的安全阈值,BAWS经过运算,对蜂鸣器送入音频信号,蜂鸣器发出警示音。
八、倒车雷达
倒车雷达的功用是发出蜂鸣音,告知驾驶人后部障碍物的情况,解除倒车时看不见车后障碍物的困扰。雷达的英文是radar,意为无线电检测和测距,其利用微波探测目标,频率范围300MHz~3006Hz。倒车雷达只是习惯叫法,其传感器并非利用微波,而是利用频率高于20kHz的超声波,一般探测距离为0.2~2m。后保险杠装有4个超声波传感器,如图17所示,俗称探头,有些车辆只装有2个。
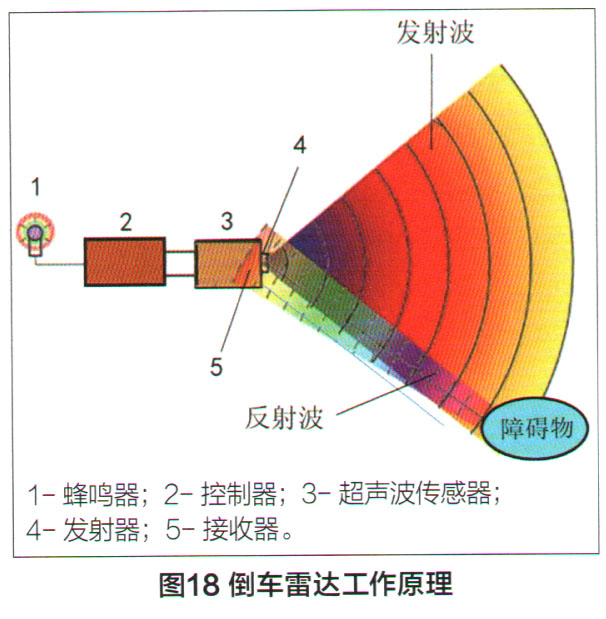
倒车雷达由超声波传感器、控制器、显示器、蜂鸣器等组成。工作原理如图18所示,超声波传感器包括发射器和接收器,用来发射和接收超声波,将接收的信号送给控制器。控制器对信号进行处理,计算出车体与障碍物之间的距离及方位,当汽车距离障碍物达到危险距离时,蜂鸣器和显示器提醒驾驶人。倒车雷达的缺点是对于过细的物体无法识别。
关键词:

")
")
")
")

