来源:汽车与驾驶维修 作者:佚名 2020-11-30 08:50:59
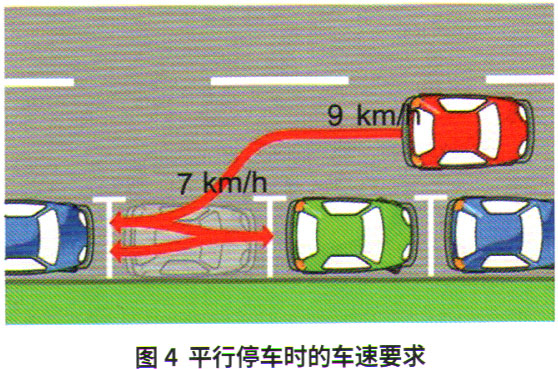
(1)平行车位驻车的车速要求
车辆从初始位置驶向停车位的最大车速为9 km/h,驶入停车位内的最大车速为了km/h(图4)。
PLA2.0可以识别出车辆与物体,知晓人行道边沿及人行道边沿的距离,以人行道边沿约0.15 m作为驻车目标,系统根据已经停好的车辆或物体的位置测量停车位长度与深度。在驻车过程中,PLA始终仿效已经停好的车辆,与之排成一列。
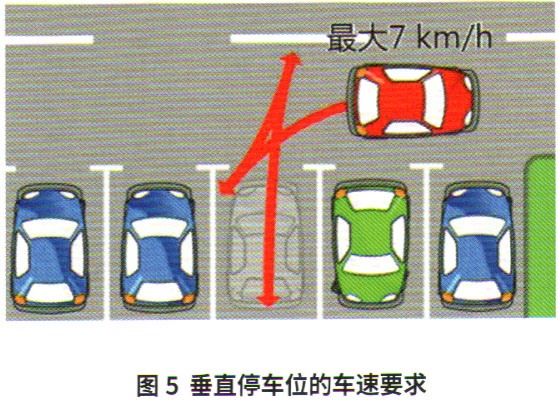
(2)垂直停车位泊车的车速要求
车辆在驶入停车位内的最大车速为7 km/h(图5)。PLA2.0系统支持在半径大于20 m的弯道内驻车,弯道半径用来计算理论路径和车辆的最终位置。
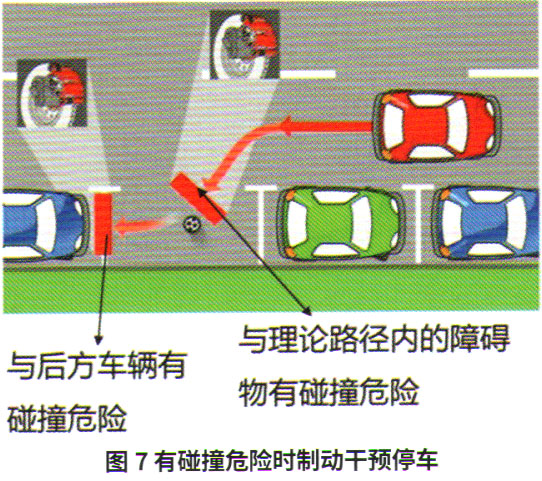
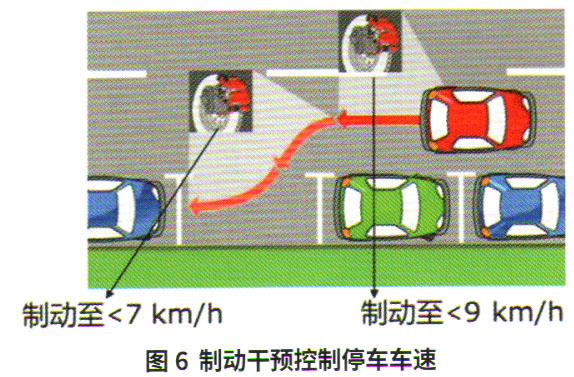
(3)制动干预
PLA识别到车辆超过驻车目标车速时,要求
ABS/ESP启动制动干预以控制车速。驻车车速的控制目标值,直线行驶阶段的车速为9 km/h,驶入停车位的车速为了km/h(图6)。在与识别到的障碍物存在碰撞可能时,
ABS/ESP进行制动直至完全停车(图7)。当车速>10 km/h时,PLA功能终止。
关键词:
")
")
")
")

