大众车型的自动泊车辅助系统(PLA)是在驻车距离控制PDC的基础上扩展而成的驾驶辅助系统,主要配置在上汽大众的中高端车型上。驾驶员借助系统,可以轻松地将车辆泊入停车位。
一、大众PLA概述
大众最初研发的PLA1.0版本,历经1.5和2.0的版本更新,如今已经升级为3.0版本。PLAL0和1.5版本的功能仅支持在平行停车位或人行道边沿泊车,对1.0版本而言,要求车位的最小尺寸为车长加1.40 m,1.5版本则为车长加1.10 m。在车速≤30 km/h的条件下,测量停车位尺寸的过程在搜寻中持续地进行,即便PLA未接通。
测量停车位尺寸的目的是探寻合适的停车位,获知车辆与停车位的相对位置。搜寻到合适的车位后,系统根据车位长度,一次性或分段式入位驻车。
PLA2.0版本的特点是平行停车、垂直停车、制动支持与驶离平行停车位。
1.探寻停车位测量过程
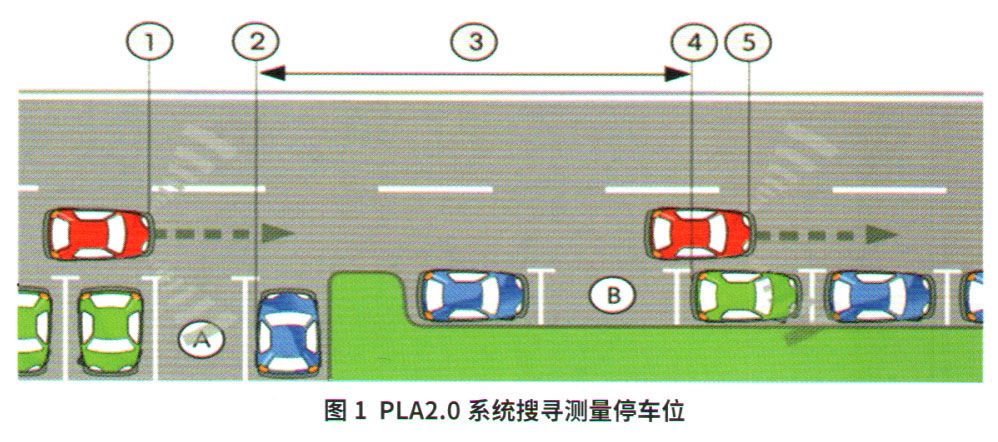
PLA未激活,车辆以≤20km户的速度行驶,在此车速下,系统可以识别出平行车位与垂直车位。如图1所示,车辆驶过垂直停车位A,垂直停车位A被临时存储在控制单元内,在搜寻下一个停车位前,停车位A仍在存储器中。当车辆驶过平行停车位B,垂直停车位A被删除,平行停车位B临时存储在记忆中。驾驶员按下PLA按钮激活功能,停车位B存储在存储器中,并在仪表显示识别到的停车位,若不满足驻车要求,驾驶员被要求继续向前行驶。
(1)系统激活条件
系统激活测量停车位的前提条件如下:
①传感器一直处于工作状态。
②传感器作用范围约4.50 m。
③向前行驶寻找平行停车位时车速≤40 km/h。
④向前行驶寻找垂直停车位时车速≤20 km/h。
⑤控制器内临时存储的始终是最后一个测量的停车位。
(2)平行停车位的参数条件
平行停车位的最小尺寸为车长加上前后至少0.40 m自由移动的安全距离,理想的初始位置为沿行驶方向与已驻车车辆的侧面距离0.50~2.00 m(图2)。
(3)垂直停车位的参数条件
垂直停车位的最小尺寸为车身宽度加上左右至少0.35 m的自由移动安全距离,搜寻车位时的车速≤20 km/h,理想的初始位置为沿行驶方向并且与驻车车辆的侧面距离为0.50~2.00 m(图3)。
(4)停车位测量的关闭条件
①车速在40~50 km加(平行停车位),20~50 km/h(垂直停车位),自动泊车转向辅助系统切换至待机模式,并在仪表上显示。
②车速再次低于40 km/h或20 km/h的极限,即使未按下PLA按钮,用于测量停车位的传感器也会被激活,系统切换为停车位测量状态。
③车速超过50 km/h时,传感器完全关闭,系统必须重新启动。
④车辆停车时间超过30s,传感器临时关闭,一旦车辆起动行驶,传感器
将重新激活。
2.驻车模式
车辆行驶一段路程,按钮处于驻车模式。第一次按下PLA按钮,PLA启动,并在仪表显示道路右侧平行停车位信息。第二次按下按钮,显示屏显示道路右侧垂直停车位的信息,若在道路左侧驻车,在按下按钮后,还需开启左侧转向灯开关。第三次按下按钮,系统关闭。
对装备起停装置的车辆而言,PLA接通时,起停功能不起作用。
搜寻到合适的停车位,换入倒挡0.5s后,启动自动驻车。系统主动实施转向干预,不允许驾驶员转动方向盘。在分段式驻车过程中,仪表显示屏向驾驶员提示前进或倒车的要求。驻车过程完成时,仪表提示将退出转向辅助。如识别到无法准确确定车辆位置或驾驶员接管方向盘,转向辅助终止。
[1] [2] [3] [4] 下一页
关键词:


")
")
")
")

