PLA1.5版本对系统传感器的布置,要求前后部各有4个用于驻车距离监控的PDC驻车辅助超声波传感器。此外前部还有2个用于停车位测量的PLA转向辅助超声波传感器,即左前转向辅助传感器G568与右前转向辅助传感器G569,安装在前保险杠外侧。它们输出的信号为转向辅助功能服务,用于测量可用的停车位,在泊车过程中监测与旁边停泊车辆或障碍物的侧边距离。
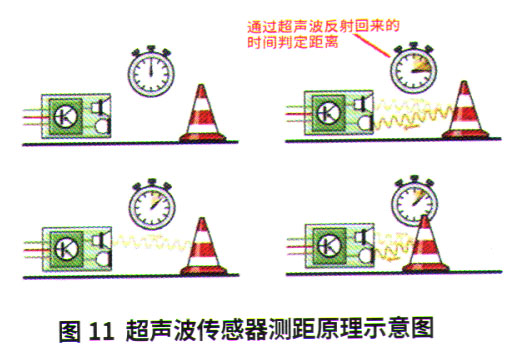
传感器工作时,薄膜振动发射超声波,通过检测被测障碍物反射回返声波的时间计算与判定距离(图11)。
前保险杠上的PDC传感器从右到左依次是G252、G253、G254与G255)中间2个传感器探测范围是120 cm,其余为60 cm。后保险杠上的PDC传感器从左到右分别是传感器G203、G204、G205与G206,中间2个传感器探测范围是160 cm,其余为60 cm。前后PDC的连续报警区均为30 cm。信号被用来控制泊车距离,传感器的布局使信号覆盖范围产生一定的重叠,故不存在任何障碍物的探测死角。
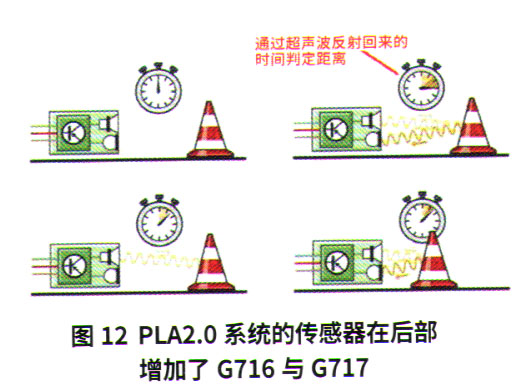
PLA2.0在系统硬件上增加了PLA侧面超声波传感器G716与G717,安装于后保险杠外侧(图12),探测范围60 cm。信号用于测量垂直停车位的实际宽度和位置,监测与侧边障碍物的距离,对车辆处于垂直停车位中央位置的校正。校正垂直停车位中央位置的目的,是让车辆停在车位的正中间。
控制单元通过前后蜂鸣器发出与距离有关的声音信号,驾驶员根据声音信号的时间间隔可以获悉车辆入位时,车辆与障碍物的距离。
PLA3.0系统在硬件上的要求与2.0版本相同(图13)。
对PLA传感器而言,一个传感器信号失效,将无法使用自动泊车功能。而PDC传感器中的一个损坏,会导致整个系统失灵,导航系统或收音机显示屏将不再显示与PDC相应的OPS图像。
关键词:

")
")
")
")

