十二、360°全景影像
倒车雷达对车辆后面的石头、大坑等不能识别,单个摄像头只能看到车辆正后方影像,无法同时看到车身四周情况,存在视角盲区,由此360°全景影像诞生。它的优点是能看清车辆周围的360°全景,如图25所示,屏幕中左画面是360°全景,右画面是车辆后方影像。
车身周围安装能覆盖周边所有视场范围的4个广角摄像头,将同一时刻采集到的4路视频影像,处理成一幅车辆周边360°的车身俯视图,在中控屏上显示。它有别于分割的图像,可彻底消灭车辆周围的视觉盲点,让驾驶人实时在车内监视车辆前、后、左、右视频画面,避免意外事件发生。同时配备前/后驻车雷达,避免因看不到车后和左右两边的情况而发生刮碰,并可以通过画面的指示调整车辆入库、倒库的角度,帮助驾驶人安全轻松停泊车辆。
十三、泊车辅助系统
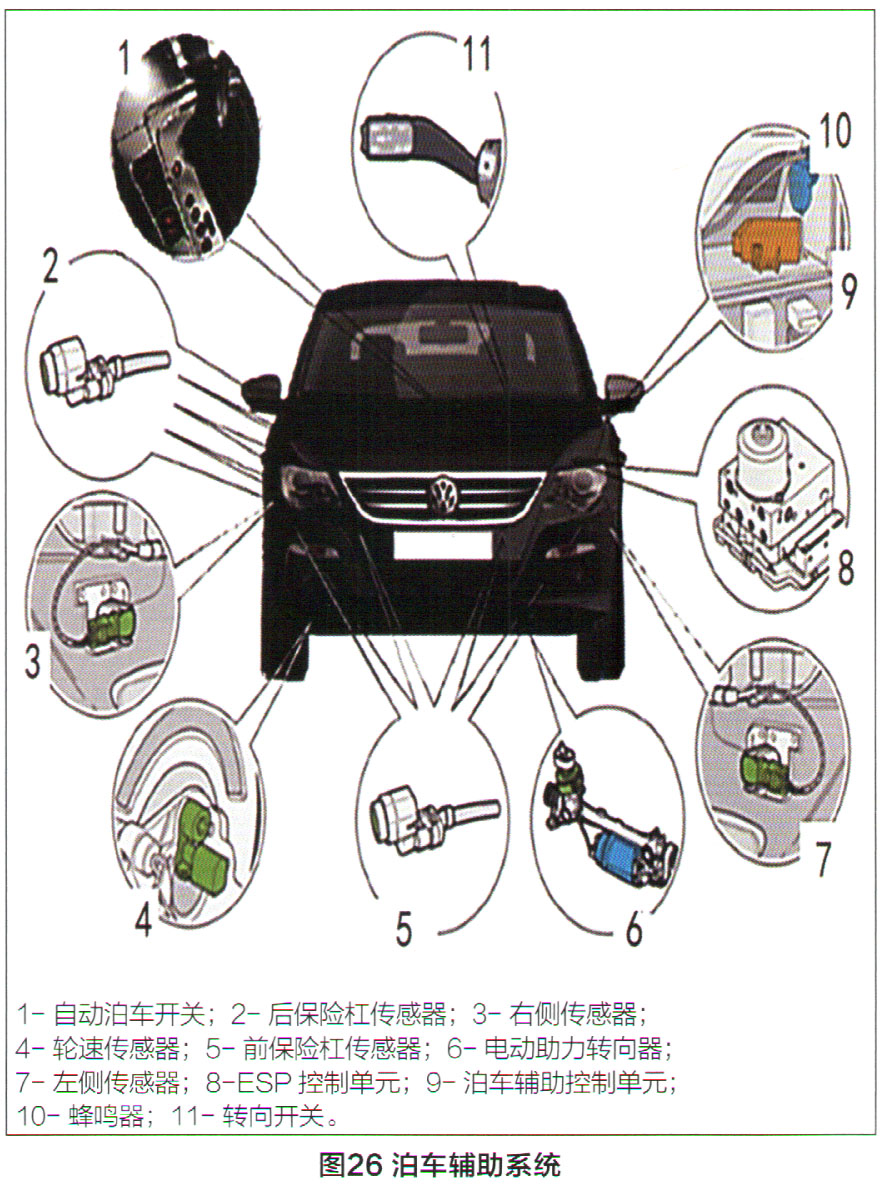
泊车辅助系统的功用:倒车时驾驶人不用操纵转向盘,只需控制加速踏板和制动踏板,该系统自动控制车辆倒入泊车位。主要组成:泊车辅助开关、泊车辅助控制单元、前保险杠4个传感器、后保险杠4个传感器、左侧及右侧传感器、轮速传感器、电动助力转向器、ESP(车身电子稳定系统)控制单元、蜂鸣器等(图26)。
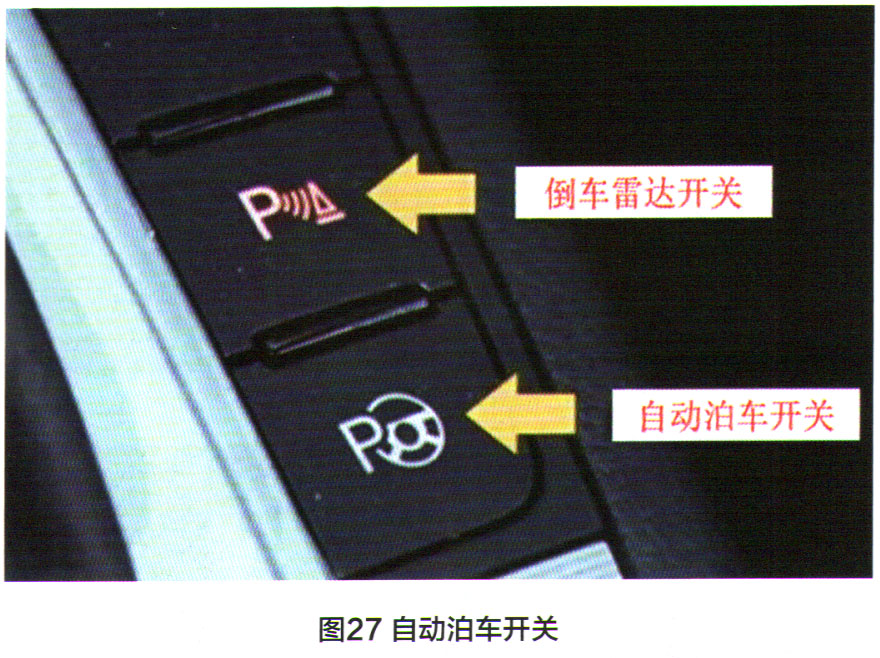
1.泊车准备,必须开启ESP,倒车过程中如驾驶人未及时踩制动,ESP有
辅助制动作用,避免碰撞。按下自动泊车开关(图27),开关指示灯随之点亮。左置转向盘的汽车默认停在道路右侧,如需要停在道路左侧,打开左转向灯,即可切换成停在道路左侧。
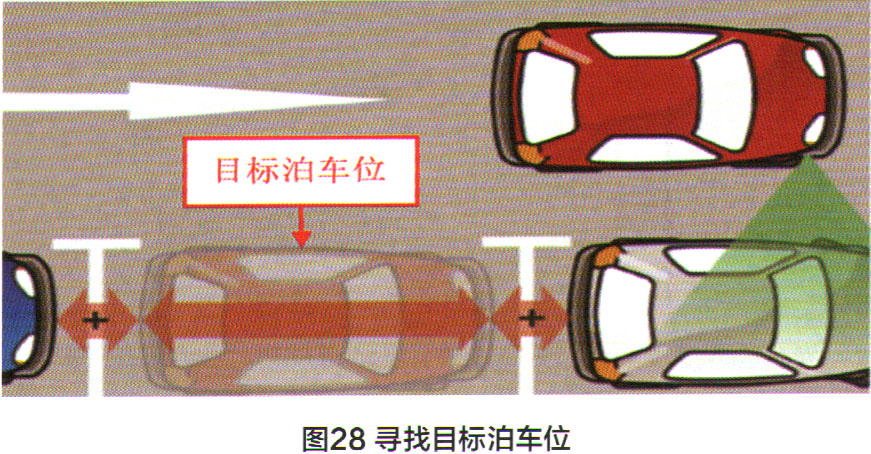
2.平行泊车,驾驶人控制车速低于30km/h向前行驶,距路边车辆大约1m,泊车辅助控制单元接收前、后保险杠及侧面超声波传感器信号,测量目标泊车位的空间大小(图28)。如果空间允许发出蜂鸣音,驾驶人停车,观察液晶屏确认目标泊车位。驾驶人挂入倒挡,轻缓踩加速踏板,泊车辅助控制单元对转向控制单元发出信号,助力电机工作,汽车倒入泊车位(图29)。
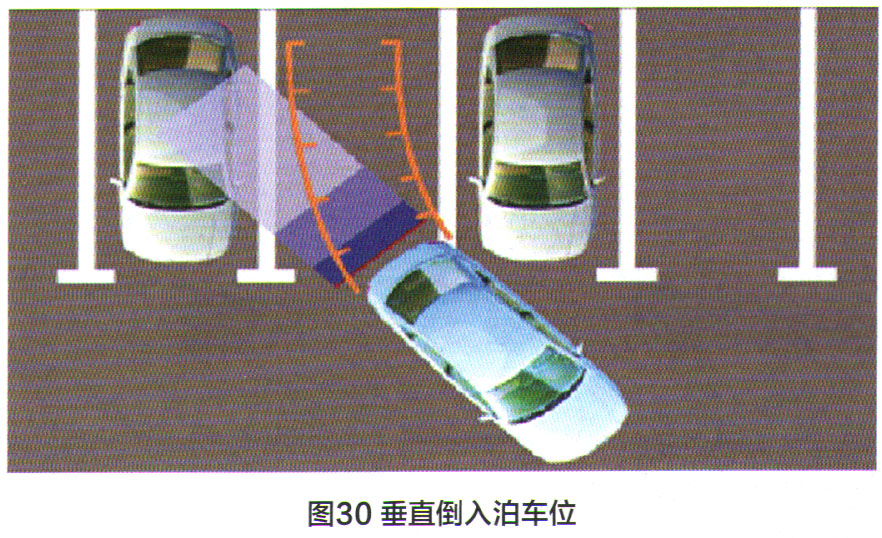
3.垂直泊车,汽车停到目标泊车位前方大约45°位置(图30),驾驶人观察液晶屏确认目标泊车位,挂入倒挡,轻缓踩加速踏板,泊车辅助控制单元对转向控制系统发出信号,助力电机操纵转向倒入泊车位。
4.倒车过程中,下列情况泊车辅助自动关闭:(1)车速大于7km/h; (2)挂入倒档后未在180s内完成泊车;(3)驾驶人作用在转向盘上的力矩大于5N·m; (4)移出倒车档;(5)关闭ESP; (6 )ESP介入工作;(7)关闭自动泊车开关。
关键词:


")
")
")
")

