・上一文章:谈农业机械故障分析诊断
・下一文章:中型客车空调系统的研究
摘要:为了避免倒车过程中因视觉误差引起的安全隐患问题,在倒车后视系统中出现了能体现倒车距离的倒车轨迹线,随着倒车影音系统的升级,又出现了可随车轮摆动而变动的动态倒车轨迹线。本文描述了能体现角度及距离的动态倒车轨迹线,并对动态轨迹线的硬件实现方式和软件实现方式做了深入细致的分析。
0 引言
倒车轨迹线是车载摄像头通过图像标定,利用标定结果画出的具有引导效果的虚拟线条,帮助驾驶员规划倒车线路。本文主要阐述了动态倒车轨迹线的实现方法,传感器自动从FLASH中调取相关辅助线图片,并接收CAN总线上的倒挡信号和计算转角信号,生成动态倒车轨迹线。动态倒车轨迹线与采集到的视频一同显示在车载导航屏。
1 动态倒车轨迹线
动态倒车轨迹线是车载智能系统,根据倒车摄像头所观测到的车后实时视频画面,通过电脑所画出的一条具有引导效果的虚拟线条道路。此线左右移动大小是依据方向盘转动角度而定的,显示于车载显示器上,覆盖于真实车后路面之上,帮助驾驶员规划倒车线路(图1)。

2 硬件系统
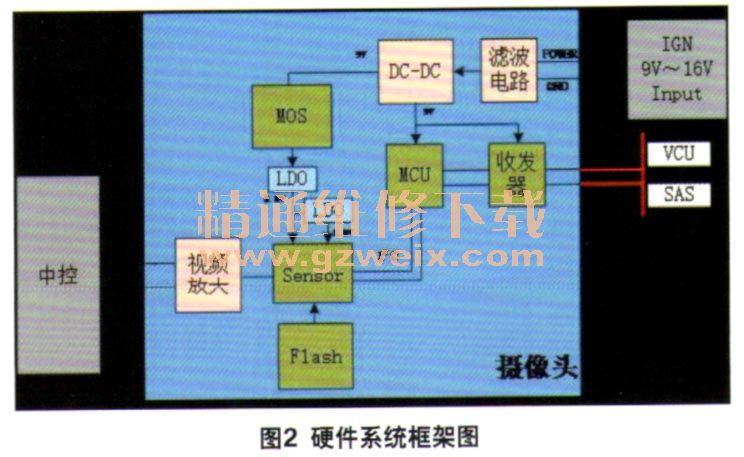
动态倒车轨迹线硬件系统由:图像采集模块、控制模块、电源模块、控制逻辑模块组成(图2)。
2.1图像采集模块
车后状态通过镜头(LENS)生成的光学图像投射到图像传感器感光面上,经光电传感器将图像信号转换为电信号,经AID转换后变为数字信号,数字信号被传送到内部图像信号处理器
(ISP),在ISP中进行插值、gamma校正、自动白平衡、自动增益和自动曝光等处理后,输出的信号经D/A转换后,最终图像传感器(SENSOR)输出视频信号,并在车载导航屏上显示。
2.2电源控制单元
电源控制单元是将车身电压通过专用的降压芯片,把电压变换成图像采集和控制单元使用的5V电压。
2.3收发器控制单元
主机控制单元需要接收车辆的转角信号,因此设计CAN收发接口电路。CAN收发电路是局域网协议控制器和物理总线之间的接口,它主要应用在汽车的高速信号传递上,为总线提供差分的发送功能和为控制器提供差分的接收功能。





