・上一文章:闭环电喷系统中的氧传感器波形分析(1)
・下一文章:奥迪A6L右后车门无法打开、玻璃升降器无法升降
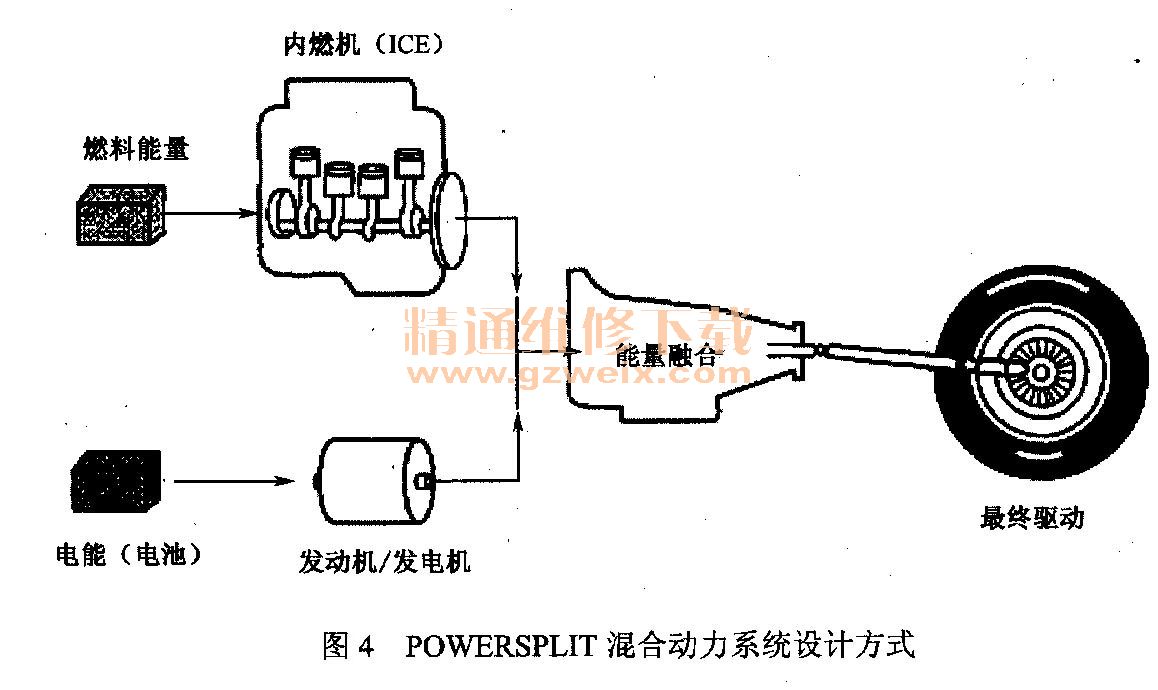
1.4动力融合技术
为了进一步区别各种混合动力电动汽车的设计方式,有时需要使用新的术语。术语“POWERSPLIT”用来描述电动机和内燃机的能量输出融合在一起的设计方式,通常这两种能量在变速箱中融合,如图4所示。
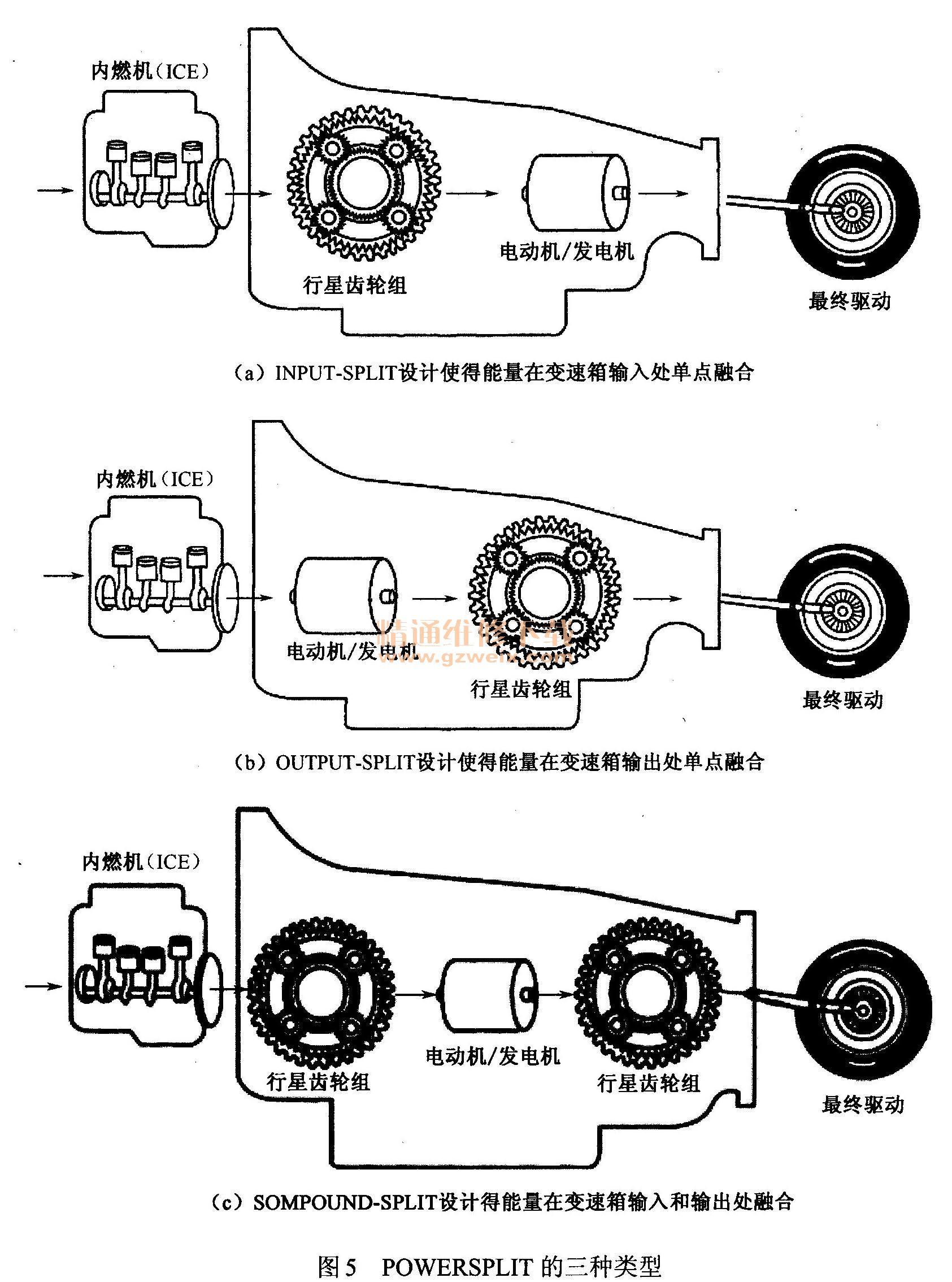
在典型的POWERSPLIT设计中,电动机速度通常决定了输出比,这种类型的变速箱称为电动无级变速箱(EVT). POWERSPLIT还可进一步细分为输入分离(INPUT-SPLIT)、输出分离(OUTPUT-SPLIT)以及组合分流(SOMPOUND-SPLIT)模式,如图5所示。
在对混合动力汽车进行定义时,POWERSPLIT类型混合动力设计还使用到术语“单模式”(ONE-MODE)和“双模式”(TWO-MODE)。单模式混合动力是指EVT中具有单个连续可变速比宽度,双模式是指具有两个连续可变速比宽度。
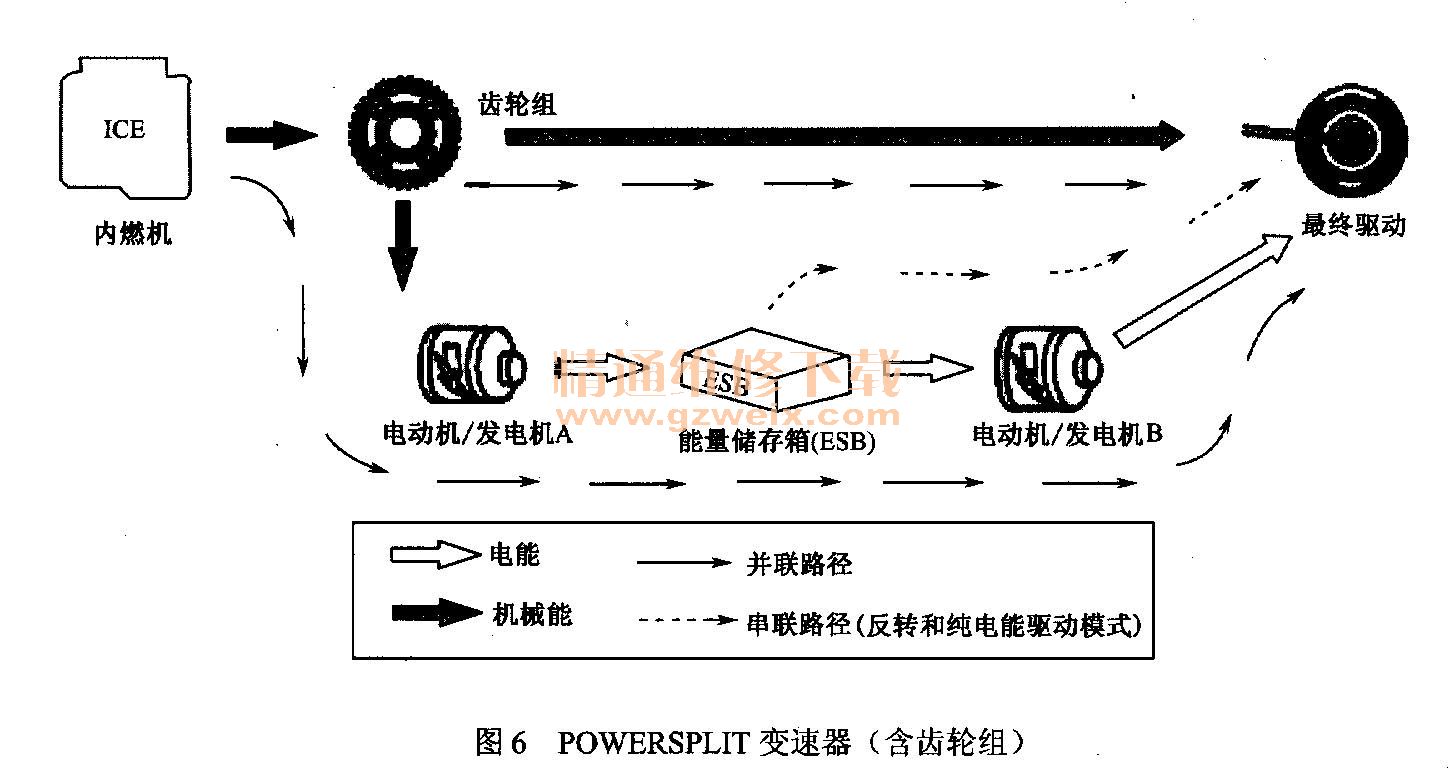
POWERSPLIT混合动力变速器将串联和并联动力传输路径结合在一起,将内燃机和电动机的能量通过齿轮组分流使用,如图6所示。POWERSPLIT系统具有单个连续无级变速传动比范围,目前通用汽车不提供单模式POWERSPLIT HEV。
双模式混合变速器可在两个连续无级变速传动比范围内工作,其原理是通过使用离合器和多个行星齿轮组,使GM双模式混合动力变速器可工作在输入分离(INPUT SPLIT)或者组合分流(COMPOUND-SPLIT)模式。
两种齿轮传动比使得GM双模式HEV系统比单模式动力融合HEV系统拥有更高的系统效率。GM双模式混合动力变速器的电动机尺寸可设计得更小,且电能要求更低。
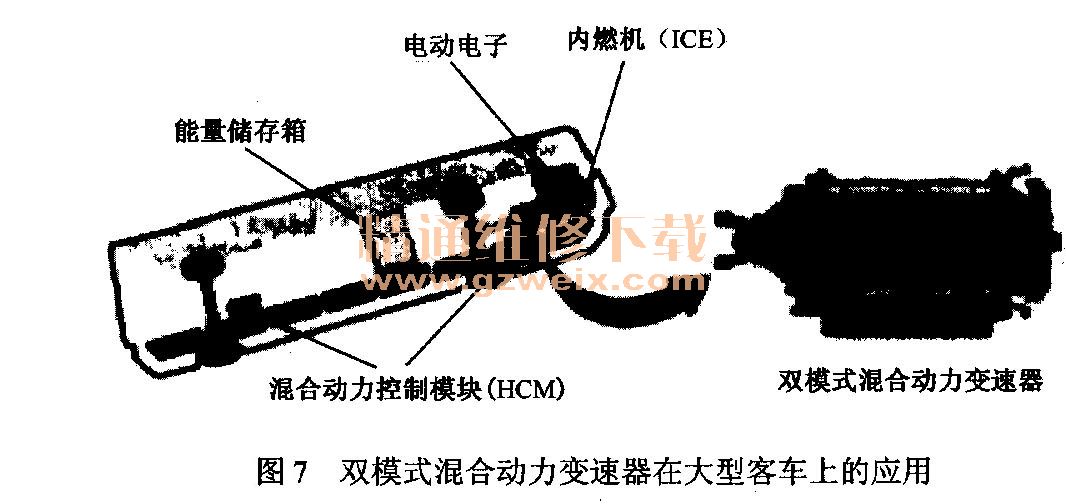
通用汽车己经研发出两款双模式混合动力变速器,在大型客车上的应用情况如图7所示。此模式允许使用小排量的柴油发动机,而较小的内燃机能提高燃料燃烧效率并减少排气量,且可帮助抵消混合动力部件的重量。双电动机/发电机位于混合动力变速器内。使用交流电(AC)感应发电机使得双模式客车HEV比装备了较大柴油引擎的传统客运车辆速度更快,通过电动机从停止状态启动使得汽车更为安静且排气量更低,包括混合蓄电池的能量储存箱(ESB)置于汽车车身下或汽车顶上。
小型汽车双模式混合动力变速器的应用如图8所示,该系统允许使用扩展周期更高效的内燃机设计,提高了燃料燃烧效率且排气更少。双电动机/发电机置于混合动力变速器内,其中发电机使用永磁体交流发电机,通过电动机从停止状态启动使得汽车排气更低且更为安静,混合蓄电池的能量储存箱(ESB)安装在乘客厢内。
1.5控制系统
在混合动力汽车上普遍采用以计算机为核心的现代计算机技术和自动控制技术,各种智能控制系统包括自适应控制技术、模糊控制技术(Fuzzy)、专家控制系统(Expert System).神经网络系统(Neural Network System)等也逐渐应用到混合动力汽车上,使混合动力汽车更加安全、节能、环保和舒适。
能量管理系统采取层级式控制:最上层为整车能量管理系统,统一协调和控制各个低端控制器;中间层包括5个低端控制器,即发动机控制器、发电机控制器、电动机控制器、离合器及制动器控制器和电池能量管理系统(BMS);最下层为各个执行器,即发动机、电动机、离合器等部件。
1.混合动力汽车控制系统的功能
(1)使混合动力汽车的动力性能接近或达到现代内燃机汽车的水平,逐步实现混合动力汽车的实用化。
(2)最大限度发挥电动机驱动的辅助作用,使混合动力汽车的燃油消耗量尽量降低,实现发动机的节能化,目前混合动力汽车燃油消耗量已达到3 L/100 km左右的水平。
(3)在环保方面,达到“超低污染”的环保标准。
(4)在混合动力汽车上实现多能源动力控制,对内燃机驱动系统和电动机驱动系统实现双重控制是混合动力汽车的关键控制技术。发动机与电动机的动力系统应进行最有效的组合和实现最佳匹配,发动机和驱动系统,电动机和驱动系统都能具有高效率,能够回收再生制动能量,延长混合动力汽车的行驶里程,改进混合动力汽车的节能性。
(5)在操纵装置和操纵方法上继承或沿用内燃机汽车主要的操纵装置和操纵方法,适应驾驶员的操作习惯,使操作简单化和规范化,在整车控制系统中,采用全自动、机电一体化控制系统,达到安全、可靠、节能、环保和灵活的目的。
混合动力汽车通常是内燃机汽车的替代和延伸,继承和沿用了很大一部分内燃机汽车的传动系统,保留了人们己经习惯的内燃机汽车的操纵装置,包括发动机控制装置加速踏板(控制发动机的节气门和电动机)、制动踏板(机械式ABS制动和控制制动反馈)、离合器、自动离合器、变速器的操纵装置等,由这些操纵装置发出控制信号,通过以计算机CPU为核心的中央控制器和各种控制模块,向内燃机的驱动系统或电动机驱动系统发出单独驱动指令或混合驱动指令,使其工作在不同的驱动模式,按照驾驶员的意图,实现混合动力汽车的启动、行驶、加速、爬坡、减速和制动时的驱动模式转换的控制。
2.混合动力汽车控制系统的基本组成
混合动力汽车控制系统主要包括:
(1)控制系统,由操纵装置、中央控制器和各种控制模块共同组成。
(2)电动机和驱动系统,电动机和电动机驱动系统的控制系统。
(3)发动机和驱动系统,发动机和发动机驱动系统的控制系统。
(4)信号反馈及检测装置,包括电量检测装置(电压表、电流表等)、显示装置和自诊断系统等。
3.混合动力汽车的控制策略
在混合动力汽车各部件的配置确定下来之后,如何优化控制策略是实现混合动力汽车低油耗、低排放目标的关键所在。在满足汽车的动力性和其他基本技术性能以及成本等要求的前提下,针对各部件的特性及汽车的运行工况,控制策略要实现能量在发动机、电动机之间能有效而合理地分配,使整车系统效率达到最高,获得整车最大的燃油经济性、最低的排放以及平稳的驾驶性能。控制策略的基本思路通常有两种:一是直接法,即直接将优化目标表示为系统状态变量、控制变量等的函数;二是间接法,即最小损失法,从计算当前驱动条件下各个部件的效率入手,得到整个系统的能量损失。损失最小的状态变量就是当前驱动条件下应该选择的状态变量,如发动机转矩、转速,电池的放电电流等。驱动条件常用驱动轴的转矩和转速来表示。从这两种基本思路出发,可以得到许多种具体的控制策略。
不同的混合动力汽车控制策略有很多种,以下讲述比较简单的基于规则的混合动力汽车稳态能量管理策略。
基于规则的稳态能量管理策略的主要依据是工程经验,根据部件的稳态效率MAP图来确定如何进行发动机和电动机之间的动力分配。将混合动力汽车控制分成了3种模式,即正常行驶模式、充电模式及制动能量回馈模式,同时将发动机的效率MAP图划分为纯电动、发动机驱动和电动机功率辅助3个区域,如图9所示。在不同模式下,根据发动机的稳态效率MAP图决定发动机和电动机的动力分配方式。
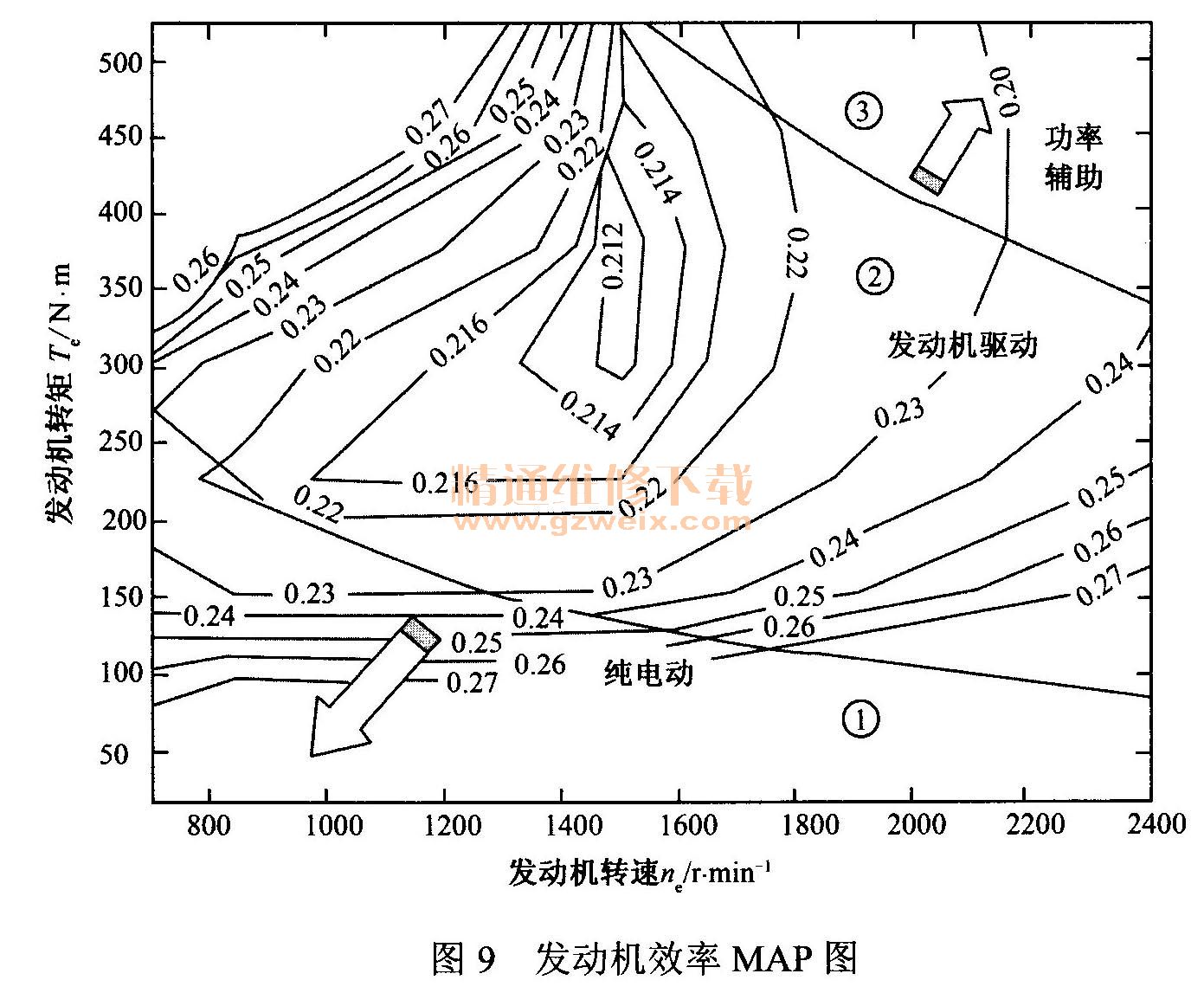
(1)正常行驶模式。在发动机效率MAP图上分别用“发动机工作最小功率”曲线和“电动机助力最小功率”曲线将发动机效率MAP图划分成3个区域:
①纯电动区域。
②发动机驱动区域。
③电动机辅助功率区域。
功率分配规则:如果需求的驱动功率小于发动机工作的最小功率,则由电动机提供全部的驱动功率;如果需求的驱动功率超过该限值,则由发动机取代电动机驱动车辆前进;如果需求的驱动功率大于电动机助力最小功率,则由电动机提供额外的驱动功率。在正常行驶模式下,发动机总是工作在“发动机工作最小功率”和“电动机助力最小功率”之间效率最高的区域。
(2)充电模式。对电池能量的管理采用了充电维持策略,即始终保持电池的荷电状态(SOC)值位于最高效率区的上下限值之间(设定为55%~60%)。当SOC值小于55%时,应切换至充电模式(当且仅当SOC值大于60%时充电过程完成),并计算电池的充电功率,该功率同时也作为电动机的目标功率。发动机的目标功率为需求的驱动功率与充电功率之和。充电模式中存在一个特例:当发动机的目标功率小于发动机工作的最小功率时,为了避免发动机在效率极低的区域内工作,仍然依靠电动机提供驱动力。
(3)制动能量回馈模式。驾驶员踩下制动踏板,表明了驾驶员对负驱动功率的需求,应进入制动能量回馈模式,吸收混合动力汽车制动时的能量。
基于规则的能量管理策略主要依靠工程经验和实验,通过限定发动机的工作区域和工作方式,达到降低燃油消耗和排放的目的,这种方法比较简单直观,因此更具有实用价值,在实际混合动力汽车的能量管理系统中得到了广泛的应用。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] 下一页





