来源:汽车与驾驶维修 作者:佚名 2021-05-09 08:23:46
2.4动态补偿
由于电动助力
转向系统在机械
转向系统中增加了助力电机和减速结构,使得整个
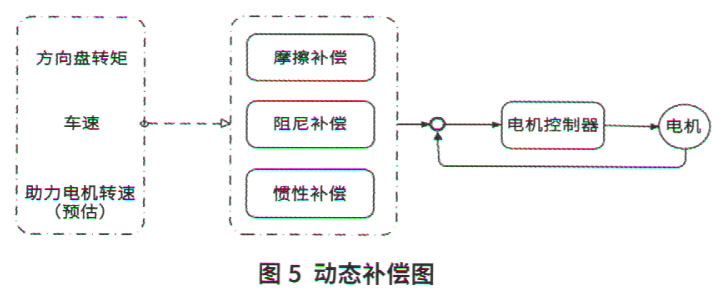
转向系统质量变大,随之导致系统惯性变大,因此必须添加动态补偿控制(图5)。动态补偿是根据预估的助力电机转速,产生一定反向的补偿力矩,避免转向电机在开始阶段和结束阶段存在转向粘滞感,导致转向助力跟随性变差。
摩擦补偿:由于
转向系统摩擦的存在,使方向盘正转回转力矩均存在差异。摩擦补偿可有效弥补这种力矩差,避免驾驶员有“发飘”的感觉,增强路感。
阻尼补偿:用来克服电机的阻尼对
EPS动态性能的影响,保证高速时抑制回正超调和振荡的情况发生。阻尼补偿产生的转矩与助力电机的方向相反。
惯性补偿:主要目的为克服转向电机的惯量对输出的影响,抑制输出力矩扰动,避免输出存在力矩波动情况,影响转向手感。
关键词:
")
")
")
")
")
