0引言
目前随着汽车行业的发展,汽车智能驾驶功能普及,传统的液压
转向系统逐渐不能满足要求,而电动助力
转向系统则可以满足自动泊车、车道偏离等智能驾驶功能要求。
电动助力
转向系统的工作过程主要包括:驾驶员在转向时,安装在转向管柱中的扭矩和角度传感器,根据检测到的扭矩角度大小,发送信号到转向控制器中。转向控制器再结合整车CAN信号中的车速信号进行判断,根据助力曲线中对应的扭矩大小,发送指令给转向电机输出对应的大小的转向助力扭矩,从而产生助力效果,减轻驾驶员操作手力。本文主要介绍某纯
电动汽车转向调校过程及转向客观测试结果。
1电动助力转向原理
汽车转向过程中的力矩关系如下:
转向阻力矩二电机助力矩+驾驶员操作方向盘力矩
转向阻力矩主要受汽车载荷、四轮参数及
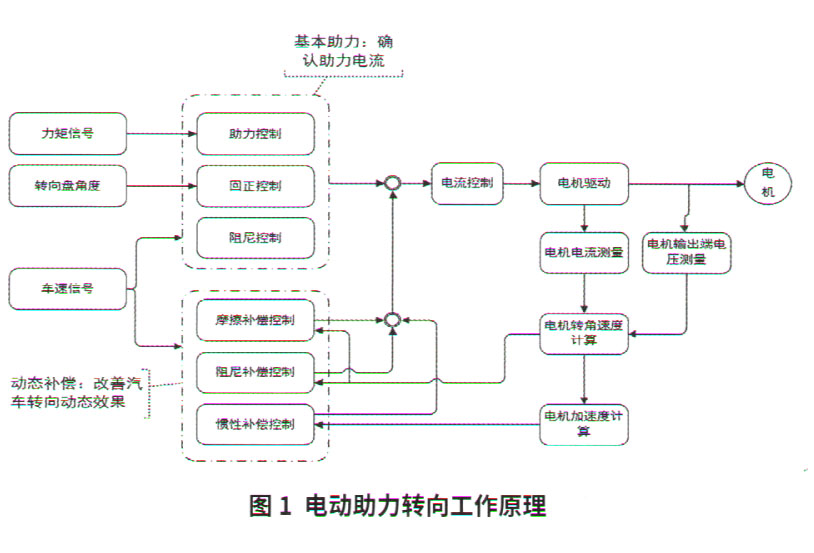
转向系统刚度等影响,这些随整车参数确认而定。而驾驶员直观感受只有方向盘力矩,调整方向盘力矩只有通过优化调整电动助力转向曲线来实现,转向曲线主要包括基本助力和动态补偿两大部分,其具体工作原理如图1。
基本助力包括:助力、回正和阻尼3大控制,其根据制定好的曲线关系,根据实时采集到的方向盘转矩、角度和车速信号,输出对应的助力扭矩。而动态补偿包括:摩擦、阻尼和惯性3大补偿,其主要弥补电机助力的弊端,提高转向时的整体效果。
2转向调校过程
本次转向调校在
转向系统刚度不变的前提下,更换转向电机(电机功率、电流提升),匹配相应助力曲线,从而满足驾驶员的要求,提升转向整体品质。
2.1基本助力
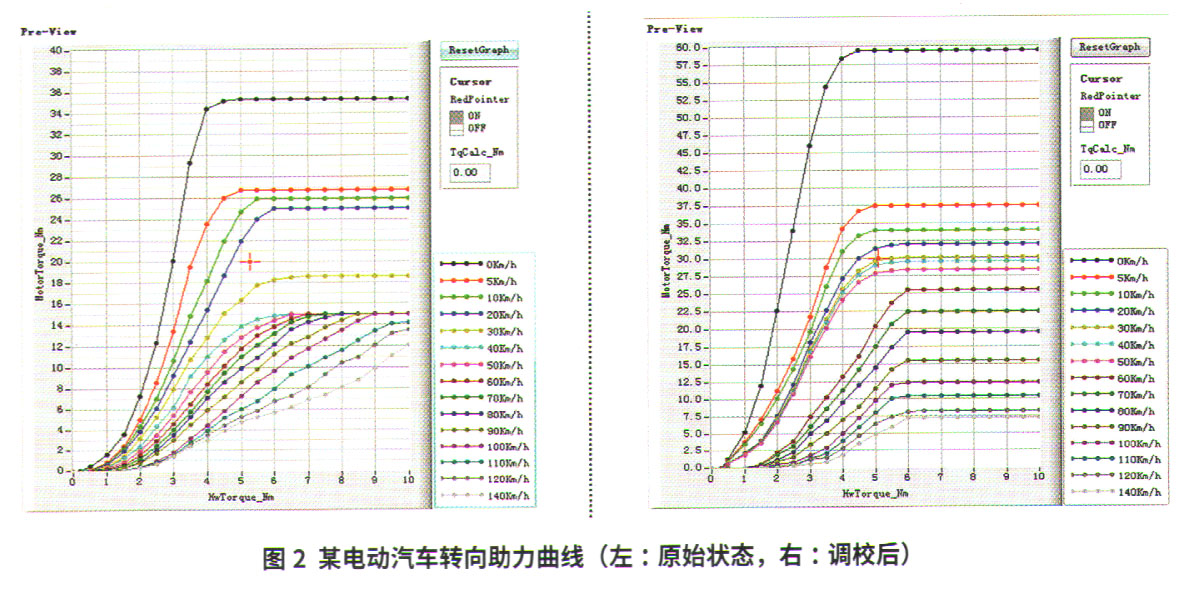
基本助力功能为电动转向基本功能,某车型随着前载荷的增大,基本助力存在如下问题:①原地/低速转向手力偏大;②转向力随车速变化有明显的建立,但转向力的增益偏大;③弯道中高速行驶工况转向力偏大。针对3项问题进行助力曲线优化调校,其优化前后对比如图2。
不同车速下转向时对方向盘施加的扭矩不同,而整车满载前载荷是固定的,因此需要电动助力
转向系统根据输入扭矩的不同,产生对应的输出扭矩,为驾驶员提供转向助力。转向调校的总体方向:驻车低速轻便,高速稳重。
在转向小转矩范围内,助力矩应最小,随转矩值的上升,助力矩逐渐上升后保持一定值不变。其中小转矩内电机小助力或不助力的目的为:保持驾驶时路面感觉的传递,防止丧失路感。而为保持较好的中间位置感觉,随着车速的升高,不助力的区域应增大。另一方面,助力上升后保持一定值不变,也是受电机峰值功率限值,达到保护电机的目的,避免过载情况。
根据汽车转向特性可知,汽车在静止和低速状态下受到的转向阻力最大,因此需要的转向助力值最大。为达此目的,原地和低速时转向助力曲线最高。而随着车速的增加,施加的转向助力应逐步减小,使驾驶员手力逐渐增大,以便获得较好的路感,达到高速稳定的目的,提高行车安全。
[1] [2] [3] [4] 下一页
关键词:
")
")
")
")
")
