・上一文章:马铃薯仓储设备的研究现状和发展趋势
・下一文章:如何通过操作转向盘感测农用车故障
摘要:本设计分为四个模块,分别是电机驱动模块,超声波传感器模块,单片机模块和液晶显示模块。单片机和电机驱动用于控制风力的大小和稳定性。超声波模块利用超声波传感器对简易风洞内乒乓球的位置进行判断。在简易风洞上端利用传感器和液晶显示配合是本设计的一个亮点,乒乓球在运动过程中液晶屏幕可显示乒乓球的运动高度。

1 设计任务
本设计为我指导的2014年电子设计大赛题目,要求实现一个简易风洞控制系统。硬件方面,我们将设计分为四个模块,分别是电机驱动模块,超声波传感器模块,单片机模块和液晶显示模块。单片机和电机驱动用于控制风力的大小和稳定性,超声波模块利用超声波传感器对简易风洞内乒乓球的位置进行判断。液晶显示模块可以实时监测小球的运动情况。软件方面,我们利用KEIL软件进行单片机编程,利用PROTEUS软件实现模拟仿真。
2 方案论证
2.1圆管的选择
方案一:
使用不透明的PVC管,需要开凿一个30 cm的长条形槽孔来观察乒乓球的位置,并需要将槽用胶带粘好,保证密封性,但是观察不够直观,且容易出现密封不好的现象。
方案二:
选择使用透明的有机玻璃管,透明度好,密封良好且不易损坏,更容易加工。
综上,我们最终选择使用有机玻璃管。
2.2支架的选择
方案一:
直接使用四根长螺丝固定风扇,再用圆管和风扇连接固定。但密封性稍差,且当玻璃管上方加传感器后,高度增加,导致重心不稳,稳定性不够。
方案二:
使用4m扩粗铁丝制作圆盘底座,底座上加有铁块配重增加稳定性,底座上有支架分别支撑有机玻璃管的上部与风扇底部,稳定性较好。
综合考虑各种因素,我们最终选择方案二。
2.3电源的选择
方案一:
使用干电池提供电源,携带方便,供电比较简单,但是电机启动瞬间电流很大,会造成电压不稳、有毛刺等干扰,严重时可能会造成单片机系统掉电,且无法满足系统的多种用电需求。
方案二:
使用直流稳压电源来提供电源,可提供5V、12V等不同电压值,这样做虽然不如单电源方便灵活,但可以将电动机驱动所造成的干扰彻底消除,提高了系统稳定性。
综上,最后选择方案二。
2.4感应系统的选择
方案一:
HC一SR04超声波传感器。它的特点是:体积小无盲区,反应速度快,10 ms的测量周期,不容易丢失高速目标。发射头、接收头紧靠,和被测目标基本成直线关系,模块上有LED指示,方便观察和测试。
方案二:
TCRT5000光电传感器模块是基于TCRT5000红外光电传感器设计的一款红外反射式光电开关,稳定可靠。主要依据乒乓球经过时红外反射的变化来判断高度的变化。如采用该传感器,需要在圆管上钻洞,放置多个传感器,操作复杂,连接的导线比较多,易出错。
所以,综上考虑,最终我们选择HC-SR04超声波传感器。
2.5单片机的选择
方案一:
STC89C51单片机,推出时间较长,比较稳定,操作简单,但其功能比较少,无法实现过多的功能。且需要使用外部模块来配合单片机使用。
方案二:
STC 12 C5 A60 S2单片机,运行速度快,功能相比STC89 C51更加丰富,不需要过多的外部模块配合,减少了出错率。
由于两种单片机成本都不高,易于采购,所以最终选择使用方案二。
2.6风扇的选择
方案一:
选用市面上常见的小风扇,体积小且价格便宜,但不能很好地控制风力的大小。
方案二:
采用电脑CPU散热风扇,效率高且风速稳定,可以通过系统得知风扇的转速进而实现控制。
由于本次设计需要改变风扇的转速来改变球的位置,所以我们选择使用台式电脑上的风扇。
2.7电机驱动模块的选择
方案一:
A3972步进电机驱动模块是自动收发卡机的设计,是基于双工位(工作通道)的,所以本驱动模块内部自带电机切换电路,可以驱动分时工作的两路电机,但是价格昂贵。
方案二:
本模块采用的L298 N是ST公司生产的芯片。主要特点是:驱动能力强,发热量低,抗干扰能力强,工作电压高,最高工作电压可达46 V,电路简单,使用比较方便。
经实验比较,L298 N驱动模块运行可靠,电气性能好,此设计最后选用L298N驱动模块:
3 理论分析与计算
风洞控制实现方法:
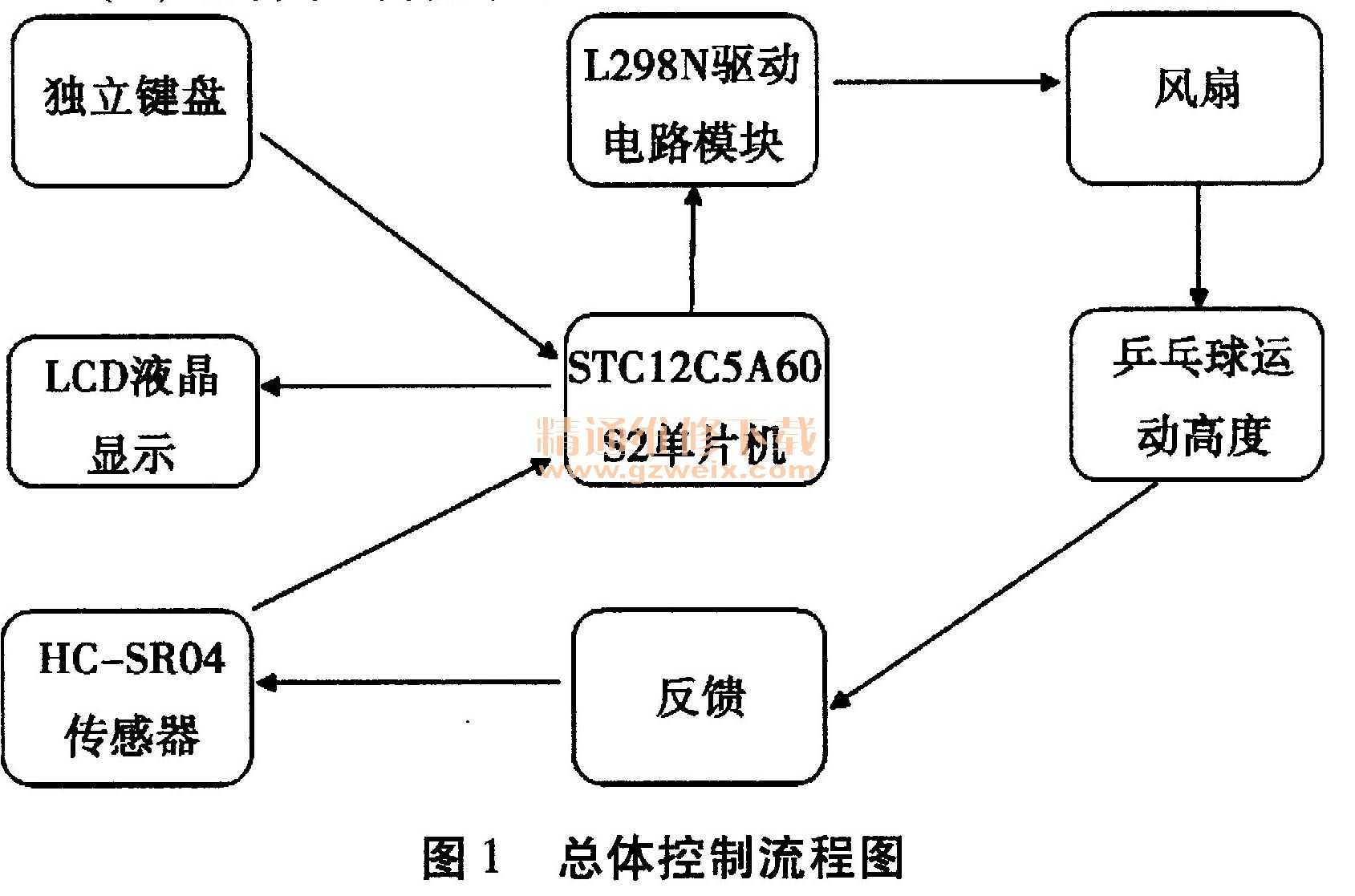
(1)总体控制流程图
(2)超声波测距框图
4 测试结果与误差分析
4.1测试仪器
数字式万用表:一块;
卷尺:精度1 mm;
秒表:精度0.1 s,一块。
4.2测试结果与分析
(1)控制小球向上达到BC段的时间和维持时间。测试数据如下表:
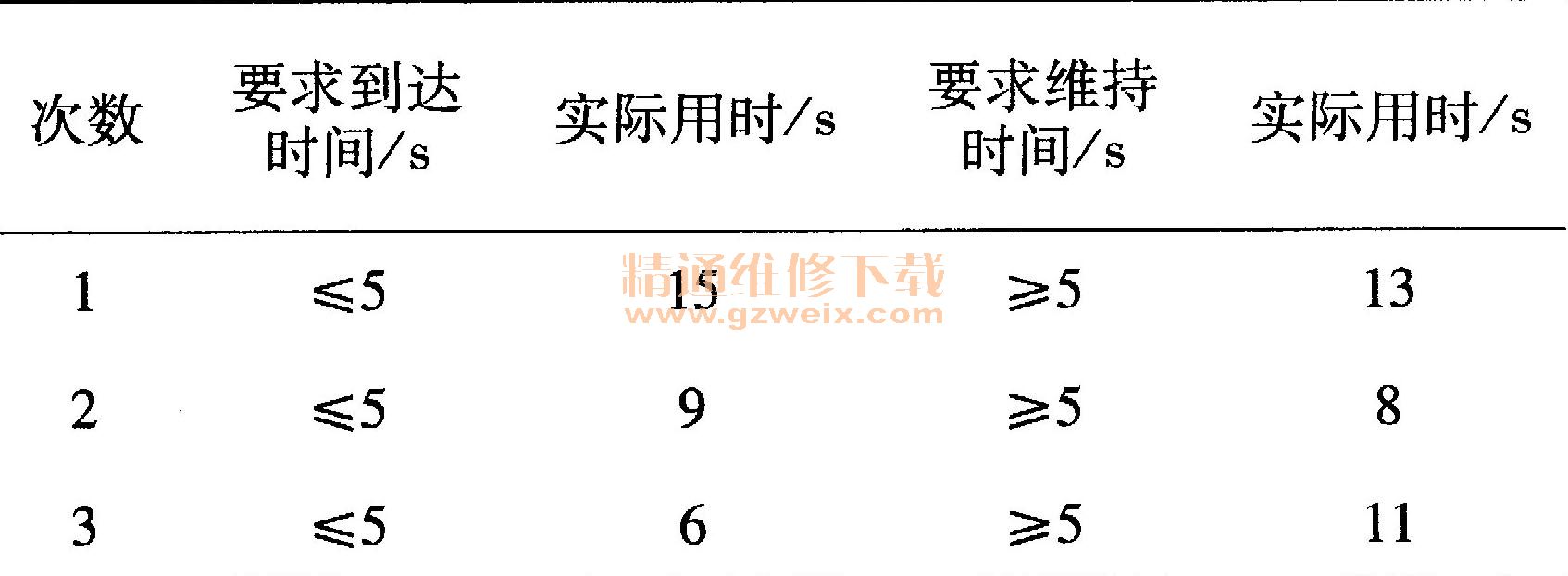
分析:实际用时比要求到达时间长,可能是圆管比小球直径大,导致气流不稳,小球上升慢。
(2)长形纸板遮挡风机进风口情况下,测试数据如下表:
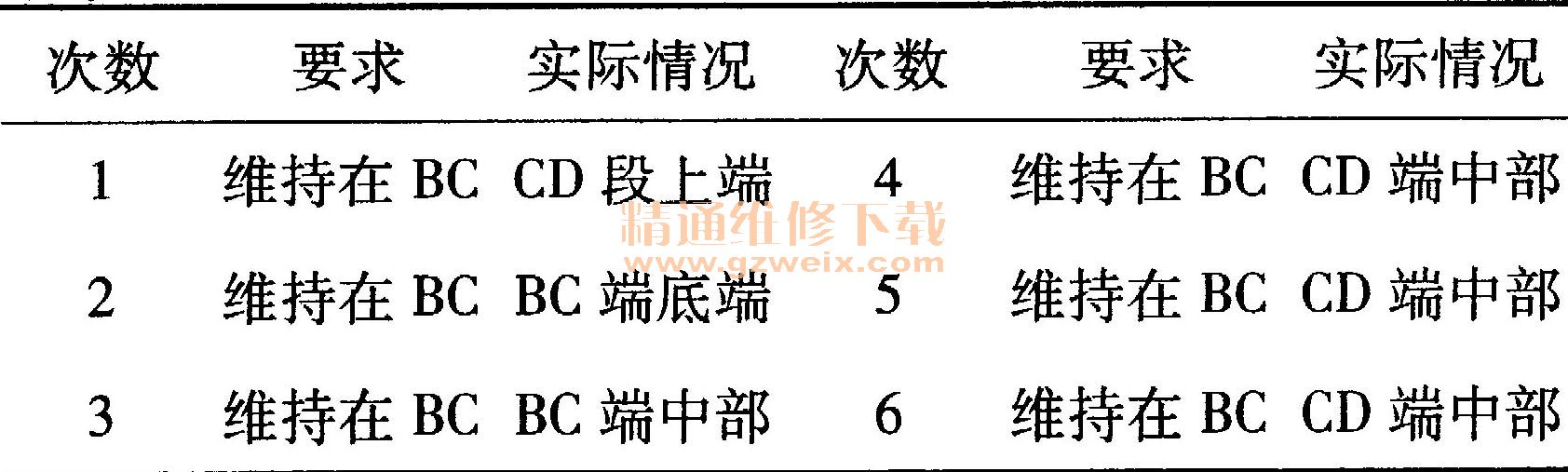
分析:长纸板遮住进风口,进风量受到影响,导致风力减弱,这时应加快风扇转动,保持不住原因是程序没有调好。
(3) LCD显示小球高度位置及小球维持状态计时,测试结果如下表:
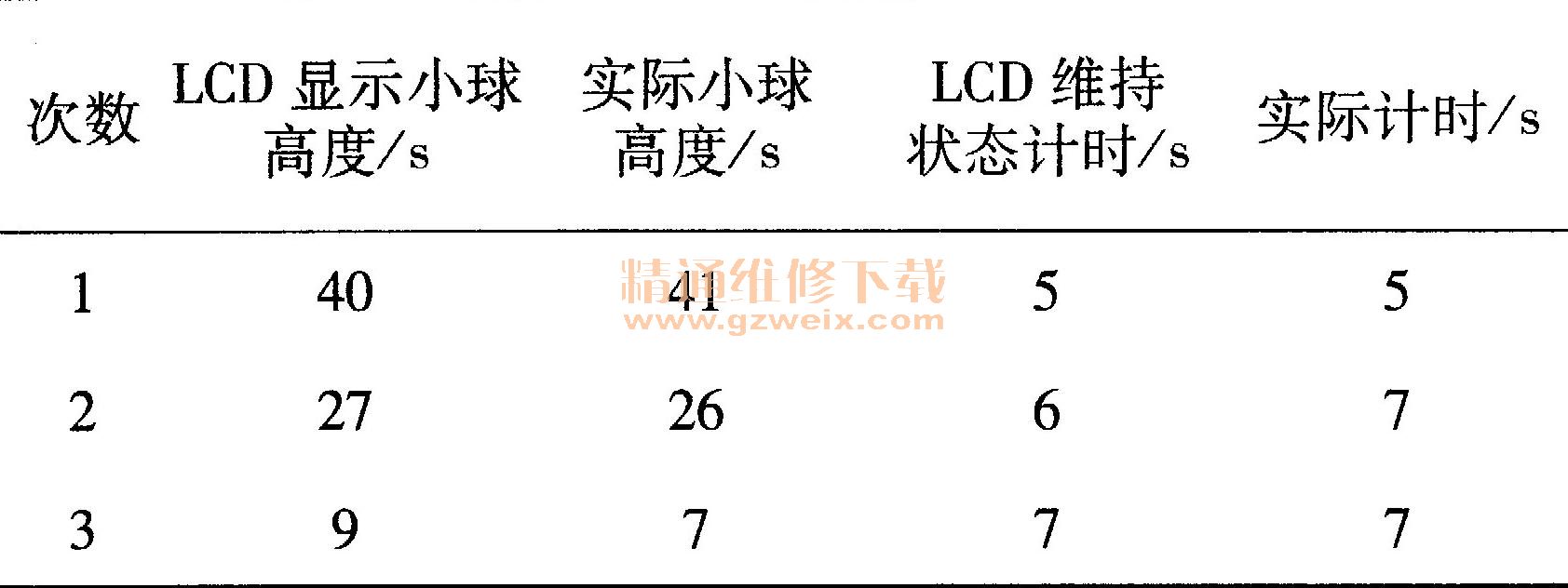
分析:由以上数据得,超声波测距工作不是太稳定,容易受外界因素影响。
(4)风机自动启动部分测试数据如下表:
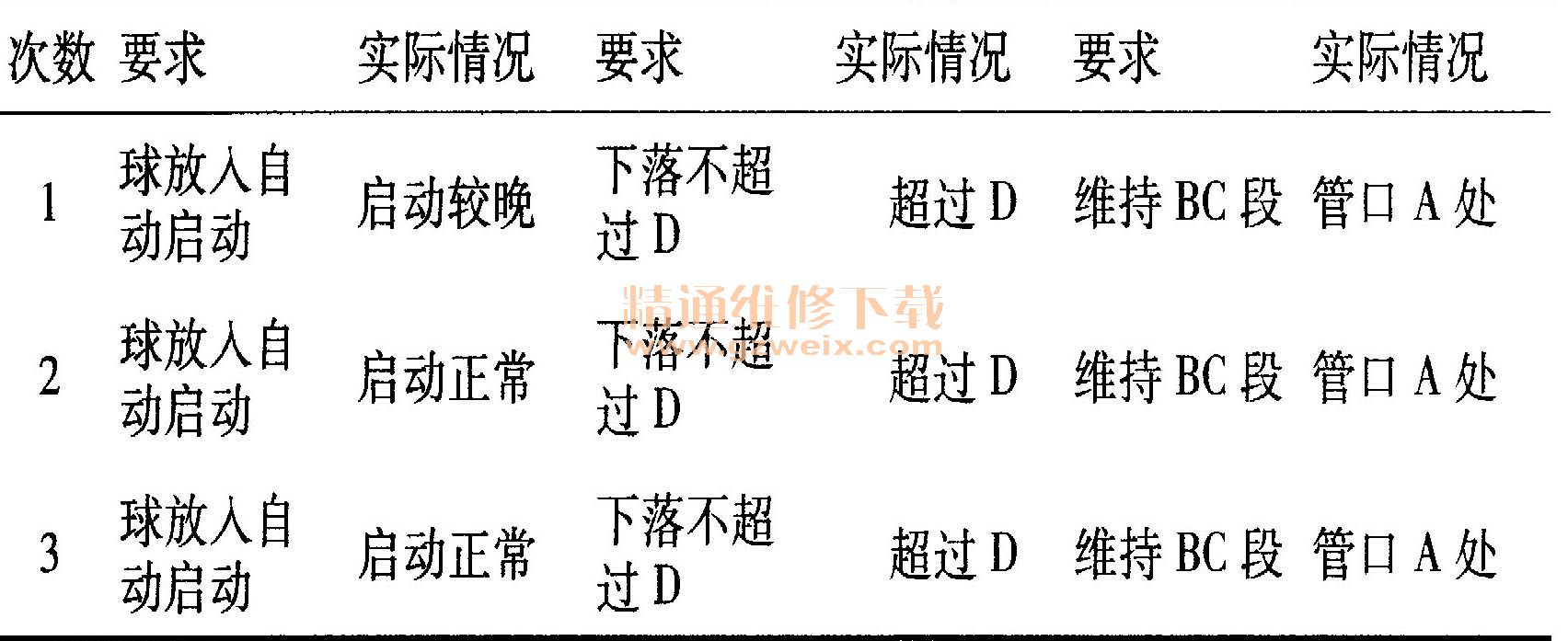
分析:小球放入后可以自动启动,但是风力调整不好,主要是由于占空比调节不好导致风力过大,小球不能维持在BC段。
(5)小球AB-CD段往返运动

5 结论
(1)电机的选择上出现了错误,开始选用步进电机,转速不够,在风洞系统中乒乓球无法被现在的风力吹起来,通过更换电机得到改善。
(2)风扇与有机玻璃管相连接的地方密封做的不到位,导致乒乓球的运动轨迹不规则且向同一方向滚动。改进方案:通过用玻璃胶粘结到风扇上得到改善。
(3) HC-SR04超声波传感器模块的放置位置导致系统试验错误。解决方案:把传感器模块的位置由风洞底部变为放置到风洞顶部,并且保持超声波传感器垂直对准风洞内部乒乓球,由此,问题得到改善。





