7 辅助零部件的设计
7.1气缸防护设计
气缸作为比较精密的部件,在曲轴清洗操作中,为了避免被清洗掉的颗粒、铁削等杂物冲击,避免高压清洗的水流冲击进气管接头或调速阀等缘故,必须加以防护。因此设计了气缸防护罩。
7.2检测装置设计
机械手抓取工件后,由机器人带动完成其他的动作,在机器人动作之前,必须检测工件是否准确的被抓取,避免由干气缸卡滞、气源故障、不正常的干涉等因素所导致的气缸移动不能到位、工件夹紧不可靠等不能正常夹紧抓取的情况发生。其次,机器人将前一工件放置到指定位置后,需要再次抓取另一工件进行清洗作业,此时需要确认气缸是否完全伸出,机械手是否完全张开,此时也必须进行检测。所以,机械手需要有两个位置的检测,即气缸完全收回、机械手处于正确的抓取状态,以及气缸完全伸出、机械手处于完全张开的状态。
这两种检测均属于位置检测,位置检测的原件有行程开关、光电开关、接近开关、磁性开关等多种,本机械手选用接近开关作为位置检测的原件,因为它具有防水、价格较低、设计结构简单、检测准确度能满足使用要求等优点。具体结构布置如下,在气缸防护罩上设计两个孔用来安装接近开关,两个孔的距离等于气缸行程,设计检测架,使其一端固定在机械手的活动手臂上,另一端装有检测块,检测块在气缸完全收回时与第一个检测开关对齐,在气缸完全伸出时与第二个检测开关对齐。
由于接近开关的电线已经接入了机器人的控制系统,在气缸收回和气缸伸出时均能检测到位置信号,可以作为机器人带动机械手动作的依据,以保证在曲轴清洗的动作中不会出现异常的故障。避免意外事故的发生。
8 防止锈蚀设计
机械手是在机器人的驱动下进行各种清洗作业的,清洗液中的主要成分是水,虽然清洗液具有防止工件锈蚀的成分,但机械手长期在高温的清洗液中浸泡和冲击,也必须做好防止锈蚀的设计。
该机械手零件设计时,气缸防护罩等薄板类零件均采用304不锈钢材料,具有很好的防锈作用;曲轴两端的顶尖采用碳素结构钢制造,表面抛光后采用镀硬铬处理,具有强度和刚性较好、防锈、耐磨性好等优点;其它结构件一般采用结构钢制造,并喷砂后经过镍磷浸镀的表面处理,这种处理工艺具有防锈效果好、镀层能较好的渗透到零部件的角落和缝隙中,是一种很成熟的防锈工艺。
9 细化数模,完善结构设计
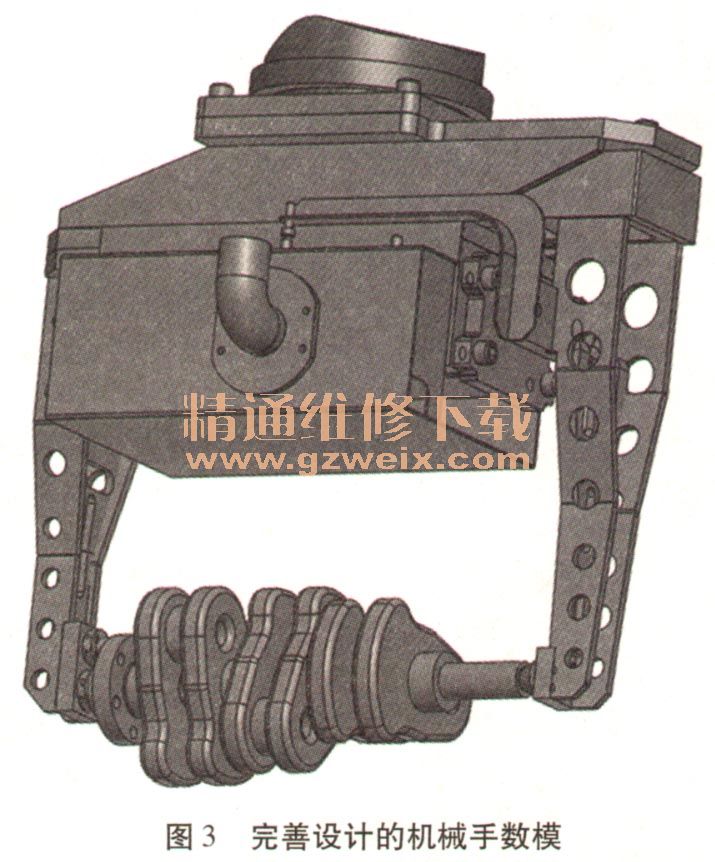
完成以上辅助设计和精量化设计,机械手臂结构具体化并轻量化,气缸按实际结构尺寸绘制数模并添加连接,增加气缸防护罩和位置检测装置,重新绘制机械手数模如图3所示。
10 结论
按照以上数模绘制工程图,编制机械加工工艺,购置气缸、接近开关等外购件,加工并装配出试验样机。通过一系列试验和测试,该样机完全可以满足拖拉机曲轴生产线清洗机械手的使用要求,说明设计方案合理、可行。
上一页 [1] [2] [3]





