・上一文章:浅谈导线的接头工艺(四)
・下一文章:浅谈散热片、电路板和印制电路板( 一)
③上述切换时序,如图 9 所示。

3. 功能设置
(1)端子功能
功能码 F117 预置为“102”,使输入端子 S3 成为切换控制端。
功能码 F130 预置为“46”,使输出端子 OUTl 成为切换信号输出端。
功能码 F131 预置为“48”,使输出端子 OUT2 成为切换信号输出端。
(2)切换数据功能
功能码 F354 预置工频/变频切换输出选择,数据码是:
“0”———无效;
“1”———仅在故障跳闸时自动切换;
“2”———工频/变频切换有效;
“3”工频/变频切换有效,故障跳闸时能自动切换。
功能码 F355 预置切换频率,数据码范围是:0~fBA(通常为工频频率)。
功能码 F356 预置变频器侧搜索等待时间 t4,数据码范围是:0.1~10.0 s。
功能码 F357 预置切换等待时间t2 和 t3,数据码范围是:0.1~10.0 s。
功能码 F358 预置变频器输出基本频率的等待时间 t1,数据范围是:0.1~10.0 s。
三、PID控制的基本概念
1. PI D控制系统的含义与构成
( 1) PI D调节的含义
PID 调节属于闭环控制,是过程控制中应用得十分普遍的一种控制方式。它是使控制系统的被控物理量能够迅速而准确地无限接近于控制目标的一种手段。
在实行 PID 调节时,必须至少有两种控制信号:
①目标信号。
通常也称为给定信号,是与被控物理量的控制目标对应的信号,用 XT表示。
②反馈信号。
是通过传感器测得的与被控物理量的实际值对应的信号,用 XF表示。
PID 调节功能将随时对 XT与 XF进行比较,以判断是否已经达到预定的控制目的。具体地说,它将根据两者的差值(XT-XF),利用比例(P)、积分(I)、微分(D)的手段对被控物理量进行调整,直至反馈信号与目标信号基本相等(XT≈XF),达到预定的控制目标为止。
(2)PID控制系统的构成
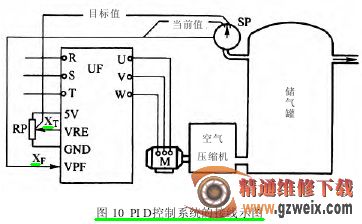
以某空气压缩机的恒压控制系统为例进行说明。如图 10 所示。其基本控制过程是:电动机拖动空气压缩机旋转,使之产生压缩空气,并储存于储气罐中。储气罐中空气压力的大小取决于空气压缩机产生压缩空气的能力(在本系统中,就是取决于电动机的转速,2 nM)和用户用气量之间的平衡状况。
为了满足用户对气压的需要,保证供气质量,要求通过变频器及其 PID 调节功能使储气罐的空气压力保持恒定。具体地说:当用户的用气量增大,使储气罐的空气压力下降时,变频器应立即提高输出频率,使电动机加速,以增大空气压缩机产生压缩空气的能力,保持储气罐的空气压力恒定。
反之,当用户的用气量减小,使储气罐的空气压力上升时,变频器应立即降低输出频率,使电动机减速,以减小空气压缩机产生压缩空气的能力,保持储气罐的空气压力恒定。
储气罐内压力的大小由压力传感器 SP 进行测量。所以,在恒定控制系统中,SP 的输出信号 XF应该始终无限接近于目标信号 XT。





