・上一文章:分析及检修铅酸蓄电池故障(二)
・下一文章:检修大众捷达双燃料车不能起动
一、 汽车空调模糊控制的实现
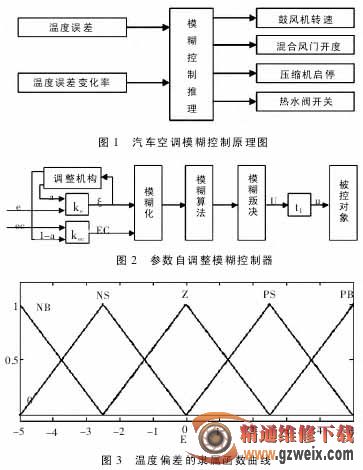
将温度设定值与车内温度的差值及其变化率作为汽车空调模糊控制系统的输入控制量,得到的输出控制量为鼓风机转速、混合风门开度、压缩机的启停和热水阀的开关。为了简化模糊控制器的设计,根据模糊控制系统的分解原理,二输入四输出的模糊控制系统可以分解为四个二输入单输出的模糊控制器。因此汽车空调模糊控制系统可分解为空调鼓风机模糊控制器、混合风门模糊控制器、压缩机启停模糊控制器和热水阀开关模糊控制器。汽车空调模糊控制原理图见图 1。
二、模糊控制器参数自调整方案
根据模糊控制代数模型对典型的二输入单输出模糊控制器进行分析,有:
u=ku(fkee+kecec)(1)
式 中 :u 为控制器的控制作用因子;ku为比例因子;f 为非线性函数;e 为偏差;ec 为偏差变化率;ke和 kec分别为偏差和偏差变化率的量化因子。本文利用模糊控制的方法,对模糊控制器的量化因子进行在线调整,其数学模型如下:
u =kuf [αkee +(1 -α)kecec]
(2)式中:α 为调整因子,其他符号定义同公式(1)。通过对调整因子 α 的在线调整实现对比例因子的调整,从而优化模糊控制效果,原理图见图 2。
对于一个经典的二输入单输出模糊控制器,量化因子 ke和 kec分别相当于模糊控制的比例作用和微分作用,比例因子 ku则相当于总的放大倍数。由实验数据和理论分析可以总结出量化因子和比例因子与系统性能的影响如下:
(1) ke对系统性能的影响
1)越大,系统调节惰性越小,上升速率越快;
2)ke过大,系统上升速率过大,产生的超调大,使调节时间增长,严重时还会产生振荡乃至系统不稳定;
3)ke过小,系统上升速率过小,系统调节惰性变大,同时也影响系统的稳态性能,使稳态精度降低。
(2)kec 对系统性能的影响
1)kec越大,对系统状态变化的抑制能力增大,增加了系统的稳定性;
2)kec过大,系统输出上升速率过小,系统的过渡过程时间变长;
3)kec过小,输出上升速率增大,可能导致系统输出产生过大超调和振荡。
(3)ku对系统性能的影构
1)ku增大,相当于系统总的放大倍数增大,系统响应速度加快;
2)ku过大,会导致系统输出上升速率过大,从而产生过大超调乃至振荡和发散;
3)ku过小,系统的前向增益很小,系统输出上升速率较小,快速性变差,稳态精度变差。
由上述分析可知,要保证一定的系统稳态精度,ke应该足够大。根据实际对象允许的最大稳态误差,按一定比例先取定 ke然后由上述量化因子和比例因子对系统性能的影响关系,可建立如下的参数调整规则:
(1) 当系统发散时,则根据系统的发散程度以较大的幅度减小 ku;
(2) 当系统振荡时,则根据振荡的程度以适当程度减小 ku;
(3) 当系统存在稳态误差时,则根据稳态误差的程度以适当的幅度增大 ku同时以较小的幅度增大 kec;
(4) 当系统过渡过程较长时,则根据过渡过程时间以较小的幅度减小 kec;
(5) 当超调过大时,则根据超调的大小以适当的幅度增加 kec。
三、调整参数模糊控制器的设计
根据上述模糊控制器参数调整的原则,针对汽车空调模糊控制系统,本文采用单输入单输出的模糊控制器对传统的模糊控制器的参数进行在线调整。将温度偏差作为控制输入量,输出控制量调整因子 α 按照式(2)对量化因子 ke和 kec进行调整。
温度偏差 E 的模糊论域取为[-5,5],模糊子集取为:
{负大(NB),负小(NS),零(Z),正小(PS),正大(PB)}隶属函数采用三角形隶属函数,其曲线如图 3 所示:
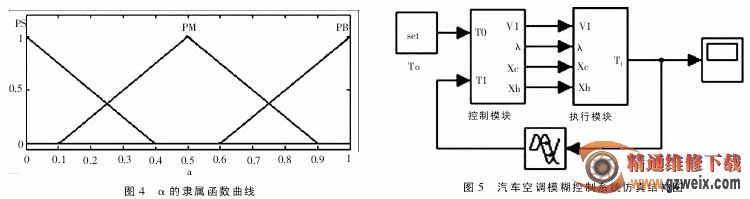
输出控制量 α 的模糊论域为[0,1]。当温度偏差较大时,为了迅速减小偏差,需要加大 ke的权重,因而就要求取较大的 α;当温度偏差较小时,为了减小温度的波动,需要加大kec的权重,选取较小的 α;当温度偏差变化中等时,为了防止温度变化过快而超过设定值,应该选取中等大小的 α,所以其模糊子集取为:{正小(PS),正中(PM),正大(PB)}
隶属函数选择三角函数,表达式如下:

隶属函数选择三角函数,其曲线见图 4。
通过上述分析,可得到如下的模糊控制规则:
(1)if E is NB then α is PB,权重为 1;
(2)if E is NS then α is PM,权重为 1;
(3)if E is Z then α PS,权重为1;
(4)if E is PS then α is PM,权重为 1;
(5)if E is PB then α is PB,权重为 1;
")
")
")
")

