・上一文章:长虹 PT4206(B)(PP06机芯)等离子彩电,开机后,无光栅,过一会儿保护关机
・下一文章:无极性电容器常见故障及检测方法
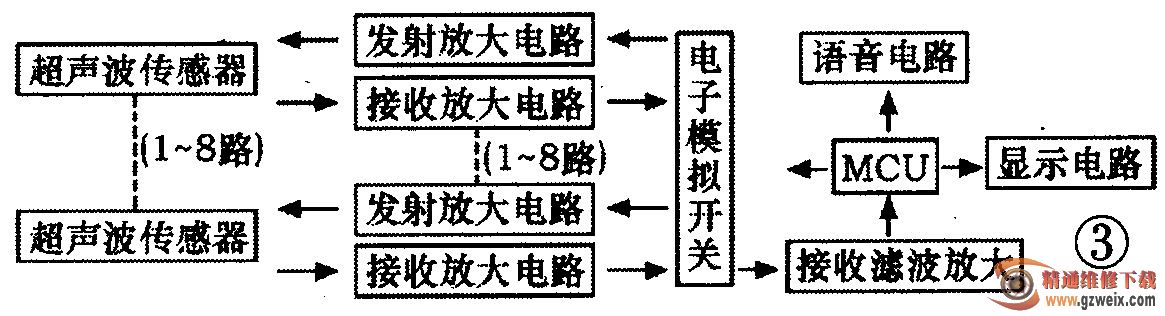
倒车雷达的电路组成框图如图3所示,MCU(MicroprocessorControlUint )通过预定的程序设计,控制相应电子模拟开关驱动发射电路,使超声波传感器工作。超声波回波信号通过专用的接收、滤波、放大电路进行处理后,由MCU的10口对其进行检测。当接收完全部传感器的信号后,由系统通过特定的算法得出最近的距离,并驱动蜂鸣器或显示电路工作,来提醒驾驶者最近的障碍物距离及方位。
倒车雷达系统主要作用是协助停车,退出倒挡或当相对移动速度超过某一车速时(一般为5km/h)系统将会停止工作。
【提示】超声波是指超过人的听觉范围(20kHz以上)的声波,具有频率较高,沿直线传播,方向性好,绕射小,穿透力强,传播速度慢(约340m/s)等特点。超声波在不透明的固体内传播,可穿透几十米的深度。超声波遇到杂质或分界面时,会产生反射波,利用这一特性可构成探深或测距,由此可制成测距系统。
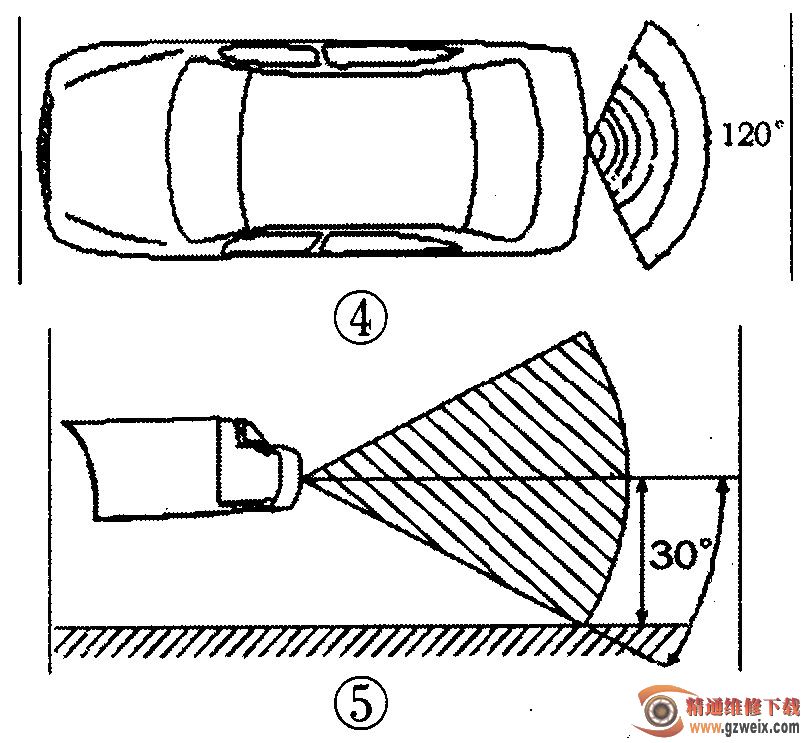
1.探测角度(或检知角度)
由于探头只能接收一定角度范围的超声波,故将这一角度范围称为探测角度(或检知角度)。探测角度有水平方向和垂直方向之分,如图4、5所示。常用倒车雷达的探测角度为水平方向90℃~120℃,垂直方向60℃~80℃ 。
2.探测覆盖范围
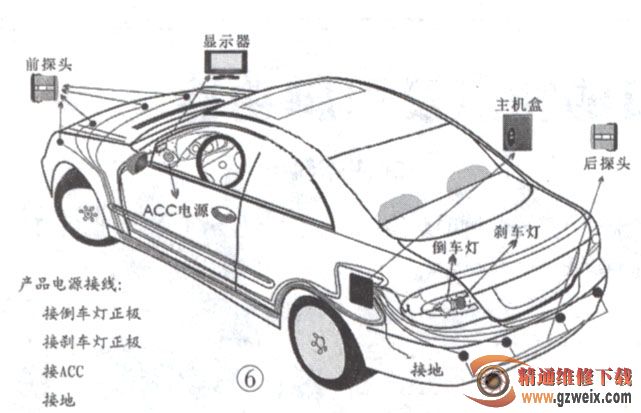
通常来说,探头的数量越多,倒车雷达的探测覆盖范围就越广,即探测盲区就越小。现在市面上的倒车雷达有2探头、3探头、4探头、6探头及8探头。2~4探头的倒车雷达一般安装在汽车的后保险杆上,6-8探头的倒车雷达一般采用“前2后4”或“前4后4”,安装,如图6所示。
")
")
")
")

