・上一文章:剖析汽车能量管理系统技术
・下一文章:分析帕萨特轿车手动空调的电路
汽车自适应巡行控制(AdaptiveCruise Control,ACC)系统是在传统巡行控制基础上发展起来的新一代智能化驾驶辅助系统,它将传统巡行控制系统(Cruise Control System,CCS)和车辆预防撞报警系统的一些特定功能采用CAN技术有机地常州外汽丰田汽车销售服务有限公司(213022)高惠民结合在一起。ACC系统的主要结构特点是利用安装在车辆前部的毫米波雷达传感器,监测前方行驶的车辆与道路通行状态,自动测量自车与前车的相对车距及车速,适时适量地对发动机电子节气门和制动器进行减矩降速的有效约束控制,使车辆始终保持适当的安全行车距离与预防撞状态。本文以丰田皇冠轿车的ACC系统为例作详细的解析。
1 ACC系统功能的模式选择
ACC系统的功能有两种选择模式,定速控制模式和车距控制模式。巡行控制开关用于两种模式间的切换,巡行控制开启后即处于车距控制模式,驾驶人可通过操纵转向盘上的跟车距离设定控制开关,选择长、中、短3种跟车距离,使自车与前车保持合适的行车距离。在车距控制模式下主要完成定速控制、减速控制、跟车控制和加速控制4种方式的控制。
2 ACC系统的组成
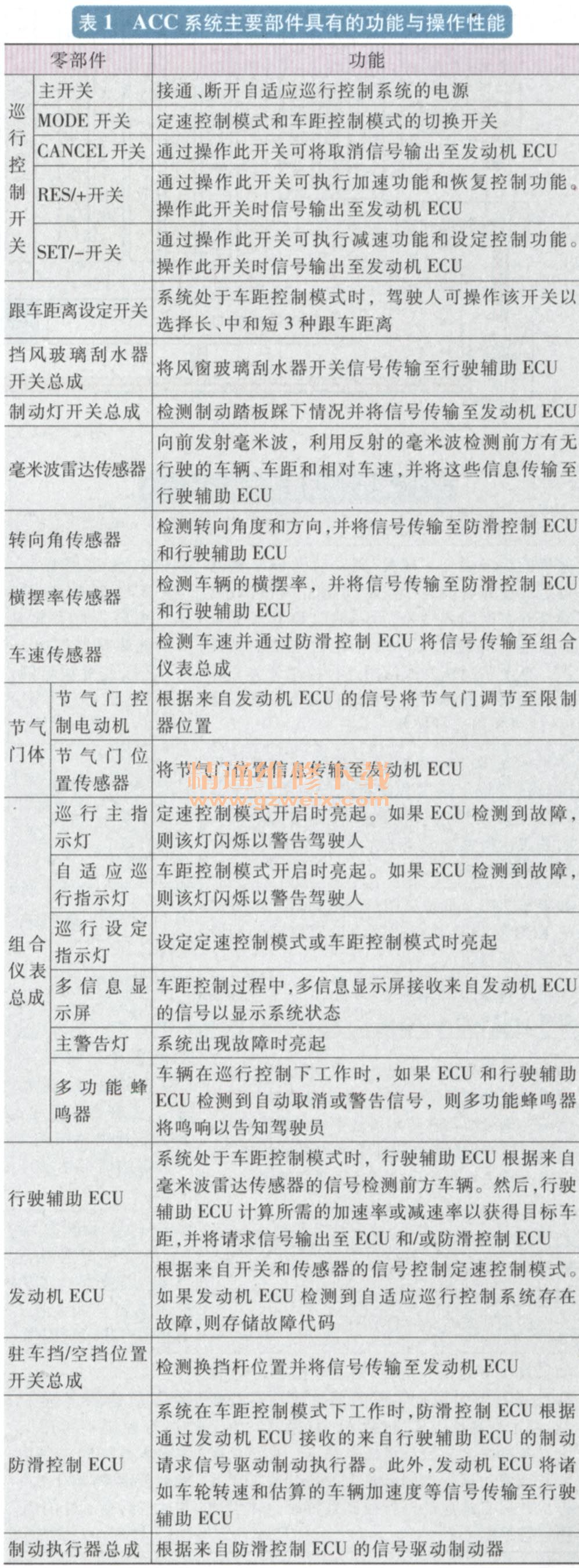
ACC系统主要零部件及其安装位置如图1所示,主要部件具有的功能与操作性能见表1所列。ACC系统的控制原理如图2所示。


3 ACC系统车距控制模式下的控制过程
3.1定速控制
毫米波雷达传感器将前方车辆的有关信息传输至行驶辅助ECU,行驶辅助ECU将此信号传输至发动机ECU。发动机ECU比较设定速度和实际车速,通过控制电子节气门,启用定速控制以获得设定速度。
3.2减速控制
行驶辅助ECU根据来自毫米波雷达传感器的信号计算目标减速率,并将减速请求信号传输至发动机ECU。一旦发动机ECU接收到此信号,即控制电子节气门以使车辆减速。如自车前方有停驻车辆、物体或自车低于可设定的车速范围时不能启用此控制;如果行驶辅助ECU判定需进一步减速,则其将制动请求信号传输至发动机ECU,一旦发动机ECU接收到此信号,即将制动请求信号传输至防滑控制ECU,然后,防滑控制ECU控制制动执行器总成以自行施加制动,以减缓自车速度,由于舒适方面的原因,在此情况下的制动力只能达到正常最大制动力(踩死制动踏板)的25%左右;如需进一步减速,则防滑控制ECU根据来自行驶辅助ECU的请求信号使防滑控制蜂鸣器总成鸣响,以促使驾驶人踩下制动踏板。
3.3跟车控制
启用减速控制后,行驶辅助ECU将请求信号传输至发动机ECU,从而可使自车跟随前方车辆,同时根据车速与前方车辆保持适当的安全车距。发动机ECU一旦接收到此信号,并且根据驾驶人操作距离控制开关选择的长、中、短3种车距,控制电子节气门以启用跟车控制。
3.4加速控制
如果行驶辅助ECU根据毫米波雷达传感器检测到自车或前方车辆已改变车道,则将加速请求信号传输至发动机ECU以获得设定速度。发动机ECU一旦接收到此信号,即调节电子节气门以启用加速控制。
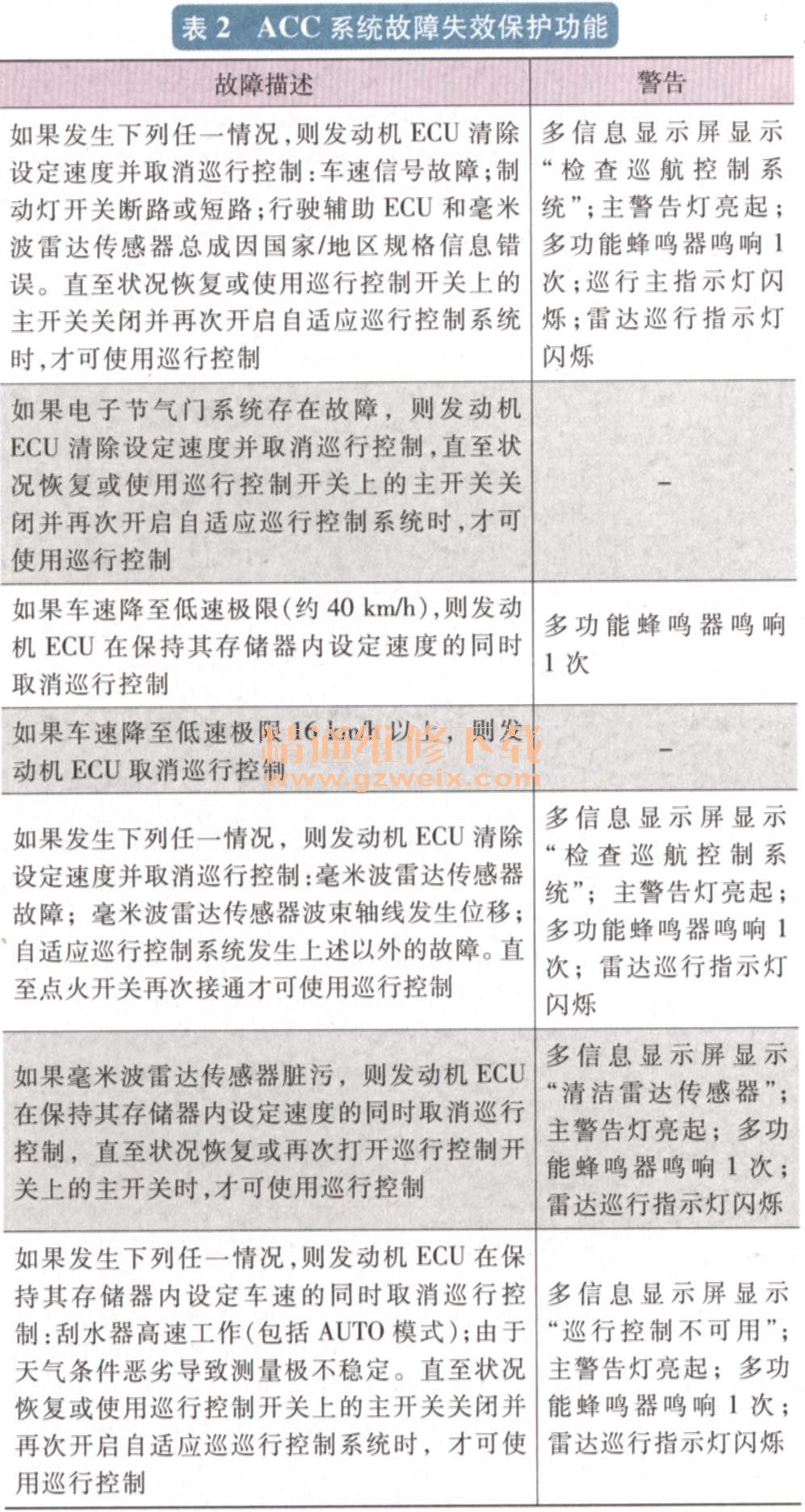
3.5自动取消ACC系统控制功能(失效保护)
车辆处于巡行控制时,如果发生表2所列任一情况,则巡行控制将取消,并通过多信息显示屏(显示警告信息)、主警告灯、多功能蜂鸣器、巡行主指示灯、雷达巡行指示灯等方式警告驾驶人已自动取消控制功能。
")
")
")
")

