・上一文章:剖析汽车能量管理系统技术
・下一文章:分析帕萨特轿车手动空调的电路
4.2毫米波雷达传感器波速轴线的调整
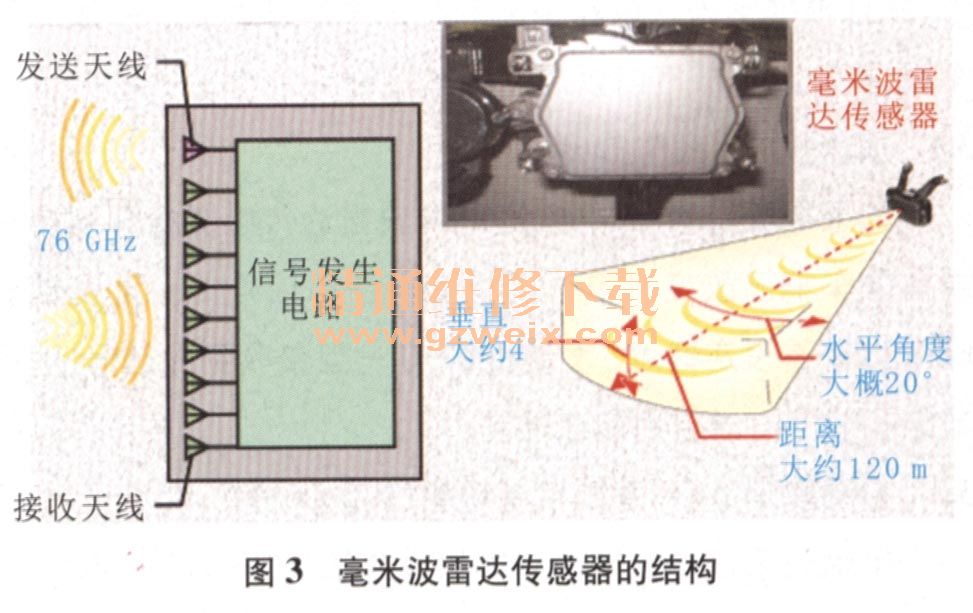
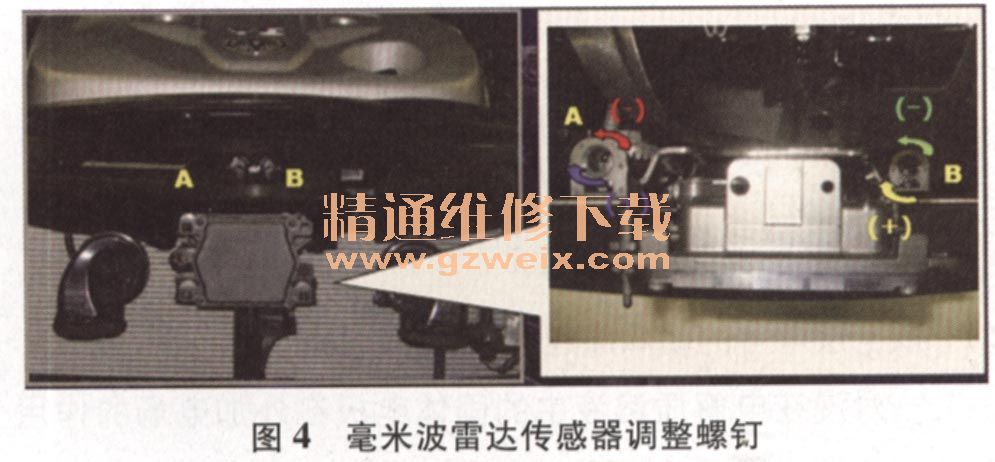
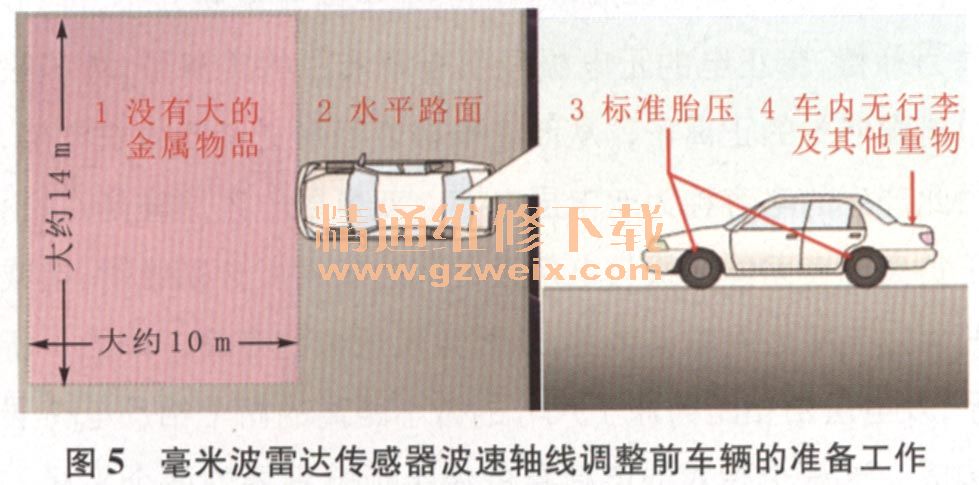
毫米波雷达传感器波速轴线调整未在允许值范围内时会读到故障信息且系统功能不激活。更换或拆装毫米波雷达传感器后,需要将车辆在无载荷且标准轮胎气压状态下,由故障检测仪配合对雷达波速轴线进行人工调整校准,以保证毫米波雷达传感器能正常获得准确的探测功能要求。如图4所示,毫米波雷达传感器上的调整螺钉“A”用于调整垂直方向(每转8.4圈监测的偏差改变1°),调整螺钉“B”用于调整水平方向(每转动14.8圈改变1°)。调整前车辆条件的准备工作如图5所示。
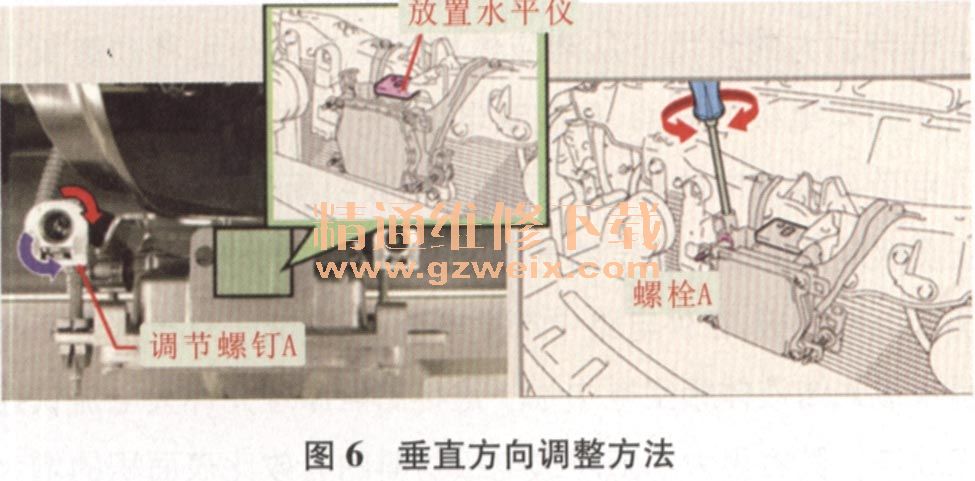
(1)垂直方向调整。如图6所示,在毫米波雷达传感器的水平支架上安装水平仪,正常状态下气泡应在红色框内,如果气泡不在红色框内,可调节螺钉A直到水平仪气泡在红色框内。注意:水平仪红色框的可调节范围是±0.2°,目标角度为±0.2°(向上角度为0.2°)。
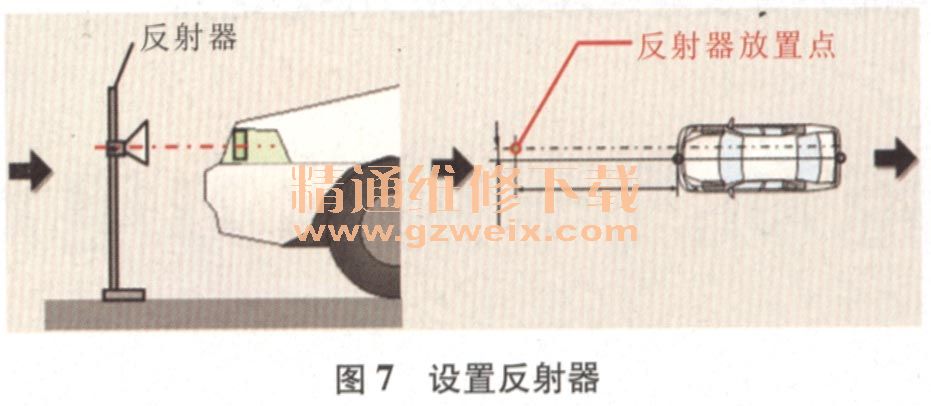
(2)设置调节反射器。如图7所示,调节反射器高度,使反射器中心和毫米波雷达传感器高度一致,将反射器放置在图7所示位置处(要准备至少10 m长卷尺,尽可能准确测量及放置反射器的距离)。
(3)检查雷达波束轴线。将智能检测仪(IT- II)连接到诊断插座(DLC3)上,接通点火开关(IG ON),打开智能检测仪和巡行控制主开关,从智能检测仪画面上选择“Auto(自动)”屏幕1,选择显示屏幕上的“Radar Cruise(雷达巡行)”,选择显示屏幕上的“Utility(实用工具)”,选择显示屏幕上的“Beam Axis Adjustment光轴调整)”,按照检测仪显示,选择“Next(下一步)”(按下“Next"前,打开巡行控制主开关,并确保毫米波雷达传感器四周与人保持距离最小要200 mm以上),检查雷达巡行发散数据画面上的项目数值,确认距离约为5m,确认左/右侧角度偏差值应在0.0°~6.3°,如果上述两个项目数据是0,则毫米波雷达传感器不能检测到目标,需要重新确认车辆前方规定区域内无金属物。
(4)水平方向调整。检查并确认雷达波束反射角为0°,标准为0°(左、右),如果反射角不符合规定,则如图8所示转动调节螺钉B,直到雷达波束轴的反射角“Right/Left Side(左/右侧)”显示为0。向右方向应将调节螺钉“B”向正(+)侧转动,向左方向应将调节螺钉“B”向负(-)侧转动,调整螺钉“B”每转动14.8圈,毫米波雷达传感器移动约为1°。如果上述值不能调整到0°,需要再次确认毫米波雷达传感器周边范围内无反射物。

(5)重置行驶学习值。选择“Next”自动重置行驶学习值,重置完成后,蜂鸣器会响10 s以上。此时断开智能检测仪,并断开点火开关(IG OFF) 。
(6)重新检查并调节毫米波雷达传感器的垂直方向。
")
")
")
")

