・上一文章:谈保时捷PDK双离合器结构及工作原理
・下一文章:雪佛兰科帕奇报P2177、P2636故障,发动机故障灯亮

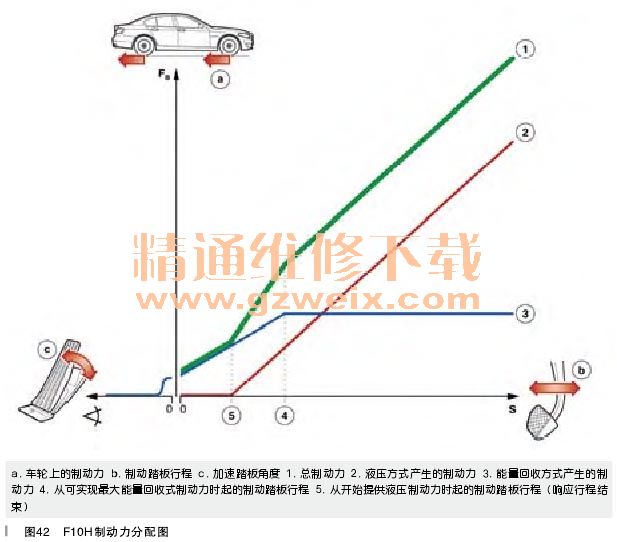
◆ 制动踏板行程由制动踏板行程传感器测量,然后由动态稳定控制系统读取
◆ 加速踏板角度由加速踏板模块测量,然后由数字式发动机电子系统读取
在未踩下制动踏板但加速踏板角度为零时,电动机以发电机模式运行。电动机电子装置通过控制电动机产生相当于传统车辆滑行模式下的整车制动力。此时回收利用的能量水平仍较低。
如果此时踩下制动踏板,就会像所有传统制动系统一样首先需要经过响应行程,在此过程中无法进行液压制动。但此时已开始对制动踏板行程进行分析并通过电动机产生比纯滑行模式更大的制动力。
如果响应行程后继续踩下制动踏板,则两种制动方式同时启用,因为此时在制动能量回收利用的基础上又增加了液压制动。通过电动机产生的制动力随制动踏板行程增加不断提高,直至达到最大。
特殊状态:
借助动力传动系进行的能量回收式制动仅作用于F10H后桥。后桥与前桥的制动力比例不能超过规定限值。否则会影响行驶稳定性。出于这个原因还限制了制动能量回收利用产生的最大减速度。
能量回收式制动产生的最大允许制动力受限于打滑稳定性监控、横向加速度和稳定性调节过程。借此确保即使在制动能量回收利用期间,车辆也始终保持稳定的行驶状态。
因此,从主动安全性角度来看动态稳定控制系统有助于节省燃油。
如果高电压蓄电池已经完全充满,则无法继续存储电能。这种特殊状态可能是为什么无法回收利用制动能量、但是偶尔发生的原因。通过运行策略可确保在正常行驶期间留出充足的高电压蓄电池储备量。也就是说,系统会反复从高电压蓄电池获取能量从而使其充电状态保持在特定范围内,即使在长时间下坡行驶过程中也能存储能量回收式制动产生的电能。
(五)液压制动力和能量回收式制动力分配
在发电机运行模式下,电动机使动力传动系统内产生一个制动力矩。该制动力矩向后车轮施加制动力。图42展示了液压制动力和能量回收式制动力的分配情况。前提是不存在不稳定的车辆状态且高电压蓄电池能够存储电能。
五、低电压车载网络
(一)供电
F10H的12V车载网络基本上与F10的能量车载网络相同。主要区别在于,能量供给不再通过发电机,而是通过高电压车载网络实现。高电压蓄电池的高电压通过EME内的DC/DC转换器转换为低电压(约14V)。因此在行驶状态下12V车载网络的电能供给不再取决于发动机的转速。
第二个区别在于,使用带有新功能的新组件-启动发电机。就像其名称一样,启动发电机可以所谓启动机和发电机运行。在发动机运行模式下(作为启动机),发动机处于工作温度时可以舒适启动发动机(部件在静止状态下而且在电动行驶期间)。启动发动机所需的能量取自附加蓄电池。直至现今首次启动发动机都通过传统启动机实现。
如果发动机正在运行,则启动发电机像传统发电机一样以发电机模式工作。此时产生的能量存储在附加蓄电池内。
启动发电机和附加蓄电池构成了独立的12V车载网络。在某些情况下,例如混合动力系统失灵时,启动发电机承担为标准12V车载网络提供能量的任务。在这种情况下两个12V车载网络通过一个断路继电器彼此连接。
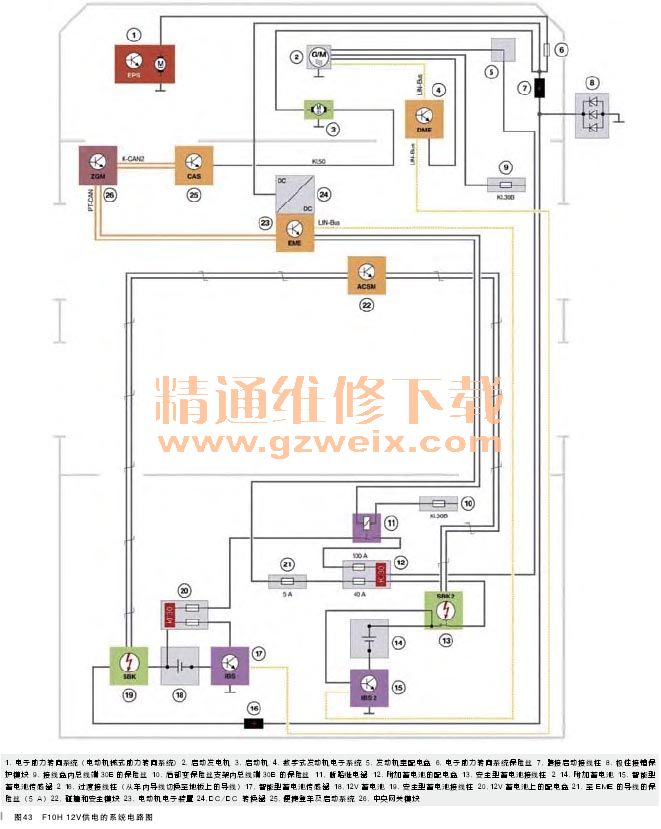
1.系统概览
F10H 12V供电的系统电路图,如图43所示。
2.极性接错保护模块发动机室内的供电组件,如图44所示。

极性接错保护用于避免极性接错时车载网络及其所连接的电子组件出现后续损坏,例如通过一个外部充电器为12V蓄电池充电期间。这个任务在带发动机的传统车辆中通过发电机内的二极管来保证。
因为在F10H中没有传统发电机,所以极性接错保护必须通过一个新组件(极性接错保护模块)来实现。极性接错保护模块安装在发动机室内右侧前灯附近。该模块一侧与蓄电池正极导线连接,另一侧与接地连接。极性接错保护模块内部有3个齐纳二极管,可以在一定时间内限制反向施加的电压。
让我们来复习一下:齐纳二极管是硅二极管,具有在朝阻隔方向运行时限制电压的特性。将一个外部电压电源(例如一个蓄电池充电器)与正确极性连接时就会运用到这一特性。在此情况下,齐纳二极管通过限制电压防止车辆车载网络电子组件电压过高。在相反的情况下,将一个外部电压电源与错误极性连接时,齐纳二极管也会像其他二极管一样产生非常低的电阻。这样可使外部电压电源实际形成短路连接,并将其电压降至接近零伏特。这样不会使车辆上的电子组件承受错误施加的(负)电压,从而对其形成保护。如果长时间将外部电压电源与错误极性连接且持续通过极高电流,就会造成齐纳二极管损坏且无法继续发挥保护作用。在此个别情况下,也会造成车辆控制单元损坏。
极性接错保护模块只能在有限时间内避免极性接错造成后续损坏。极性接错保护模块无法承受长时间极性接错,而且这样会造成该模块损坏。而且还可能对车载网络电子组件造成后续损坏。
")
")
")
")

