・上一文章:丰田佳美轿车倒档功能失效
・下一文章:奥迪A8L空气悬挂无法正常升起




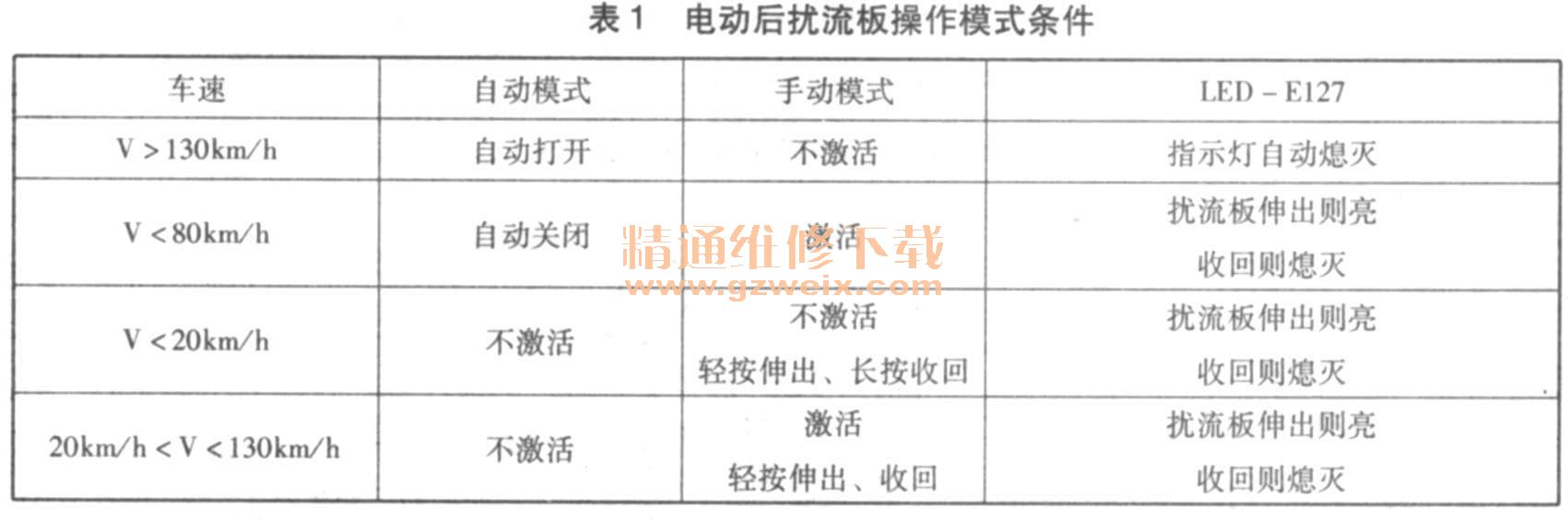
电动可调后扰流板诊断:测量值、LIN信号状态扰流板开关状态、最终位置识别、状态指示灯与警示灯状态、电机/扰流板控制单元/开关中的LED的功能故障。执行元件测试:将扰流板移动至最终位置。调整设置收回位置(调整后扰流板位置)。霍尔传感器计算的从最终弹出位置到最终收回位置的步骤,步骤数可在调整时设置。
电动可调后扰流板防玩模式:内置技术器,手动操作一次计数器加1,如果10s之内不操作计数器减1,若连续识别出15次激活操作,则手动模式会关闭,以保护扰流板驱动装置(电机过热),仅限制收回,不限制伸出。当运输模式激活时,不影响自动模式,但是手动模式失效。
电动可调后扰流板应急运行模式:当出现紧急运行的条件时扰流板朝伸出方向移动。应急运行的原因:LIN数据总线出现故障,缺少ESP的速度信息,霍尔传感器发出的最终弹出位置信号失真,电源降至10. 5V以下(不包括电机启动时),在未启动后扰流板时,后扰流板改变位置。组合仪表中的警告:若扰流板处于应急运行状态,且速度低于130km/h,则亮起黄色警示灯,若速度高于130km/h,则亮起红色警示灯,若识别出某项功能故障,则持续亮起红色警示灯,数据存储器中会留下一条记录。
五、奥迪主动式车道辅助系统
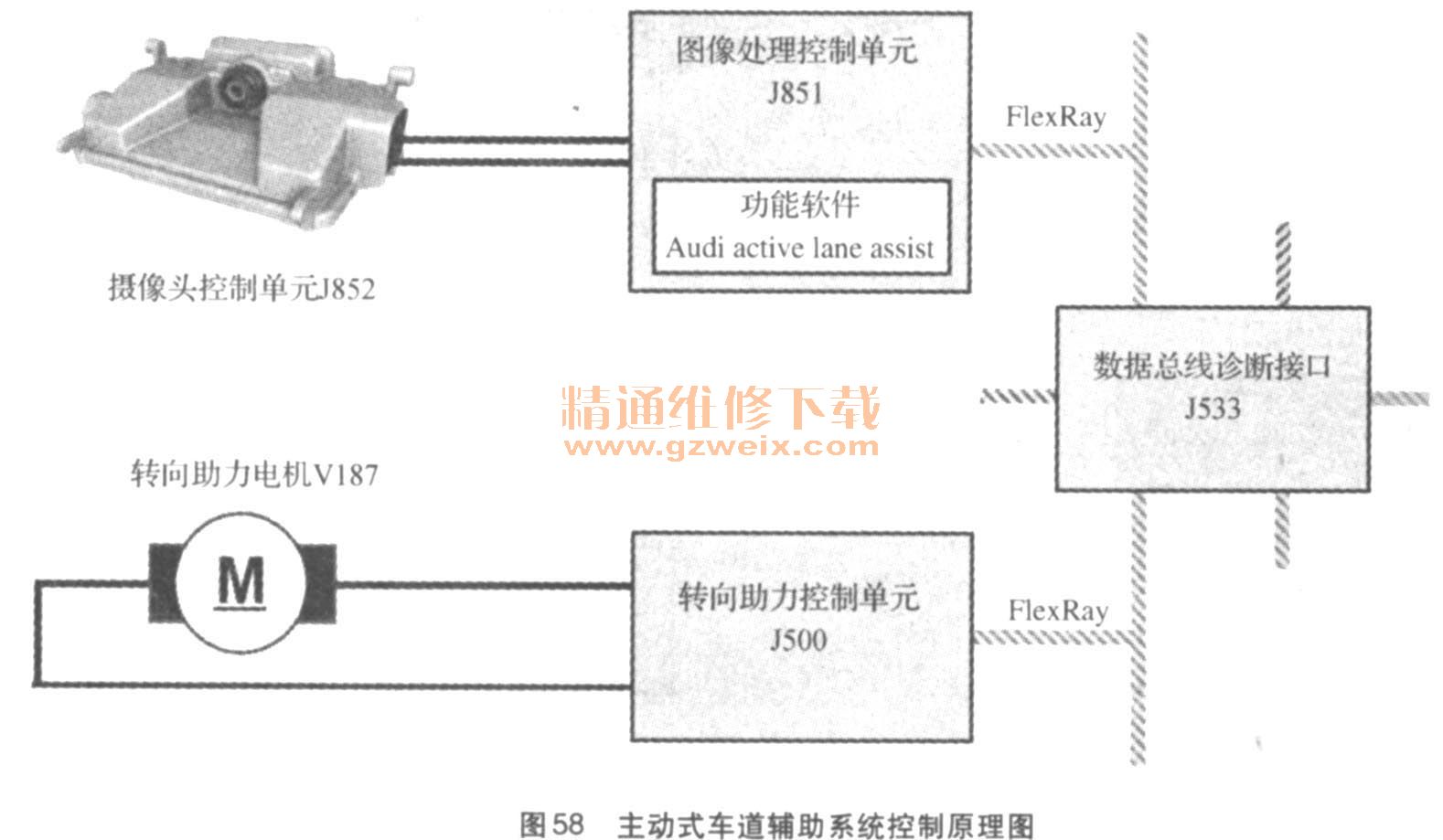
奥迪主动式车道辅助系统(Audi active lane assist)与奥迪车道保持辅助系统(Audilane assist)的区别:系统的转向干涉方式,系统模式1:帮助驾驶员将车辆保持在车道中心处;系统模式2;帮助驾驶员来防止车辆无意间驶离本车道。转向盘振动由电动机械式转向器的电机来产生。可以在MMI上关闭转向盘振动这种系统警告。该功能的主控制单元是图像处理控制单元J851(如图58所示)。
MMI操作时的系统响应(如图59所示):信息电子系统控制单元1-J794将MMI上的操作信息通知控制单元J851。在操纵MMI期间,转向干预会提早进行的,且转向干预力矩也较大,在操纵MMI期间,振动警报也会提前。

手脱离转向盘(脱把行驶)时的系统响应(如图60所示):转向助力控制单元J500通过转向力矩传感器G269来识别驾驶员的手是否离开了转向盘,并把这个信息告知控制单元J851,如果识别出驾驶员的手确实离开了转向盘,图像处理控制单元J851会暂时关闭该功能。

在识别出有障碍物时系统的响应(如图61所示):驻车辅助、车距调节和变道辅助这些控制单元会送来一些测量值,从这些测量值中就可推断出本车旁边是否有障碍物。如果必须要躲开车旁的障碍物,那么转向干预会提前发生的,且这个干预力矩也比较大。振动警告也比通常要早些。

有意变换车道而又未打转向灯时系统的响应(如图62所示):在变换车道时如果满足某些条件的话,那么即使未打转向灯,系统也不会发出警告。

这些前提条件如识别出本车的前方有车辆在行驶,本车与前方行驶车辆保持着一定车距,本车与前面行驶车辆的车速差大于10km/h。
")
")
")
")

