・上一文章:丰田佳美轿车倒档功能失效
・下一文章:奥迪A8L空气悬挂无法正常升起
六、第二代驻车转向辅助系统
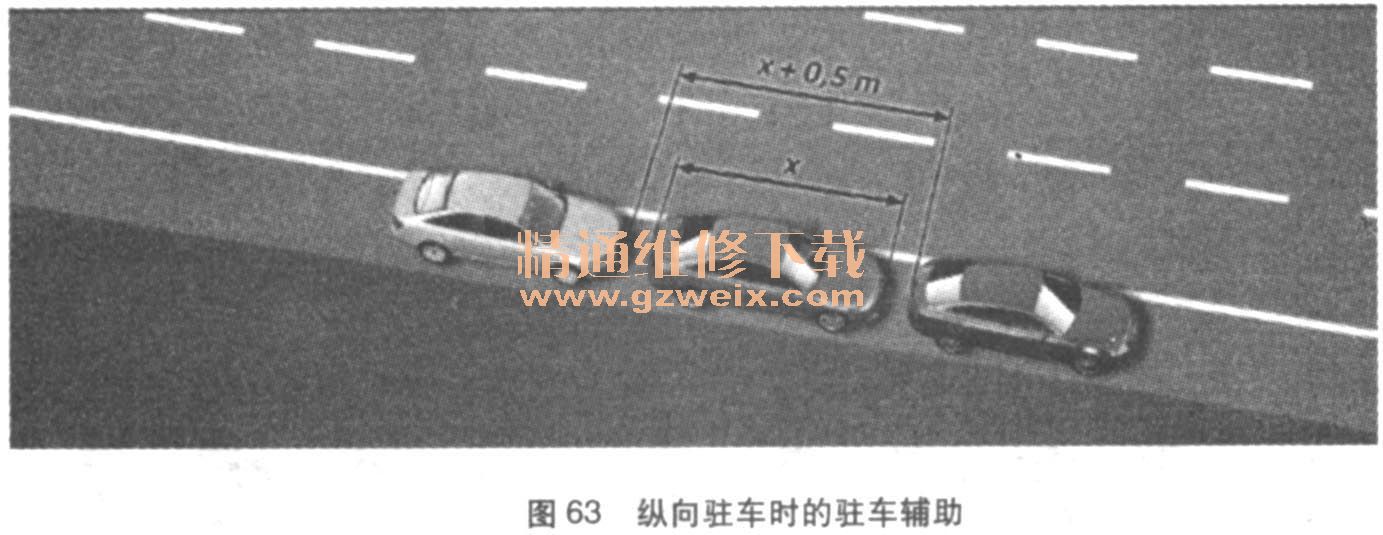
第二代驻车转向辅助系统纵向驻车时的驻车辅助(如图63所示):将停车空位的长度减少到车长+0. 8 m。在停车空位较小的情形下(x+0.8m到x +1. IM),报警持续音起始距离从30cm减少至20cm。车辆驶过纵向停车空位时的车速低于40km/h,才会去识别这个车位是否合适。使用前面两个驻车转向辅助传感器测量停车空位的长度和深度。弯道处纵向驻车时,系统提供驻车辅助功能前的最小转弯半径从40m降至20m。搜索停车位时的允许驶过距离是0. 5 m到2. 0m。可识别的停车空位可以是两车之间或者一车之后,但不能在一车的前方。按下按钮E581一次就可以激活驻车转向辅助系统。基于实际的停车情形,可能将车停在马路牙子上。
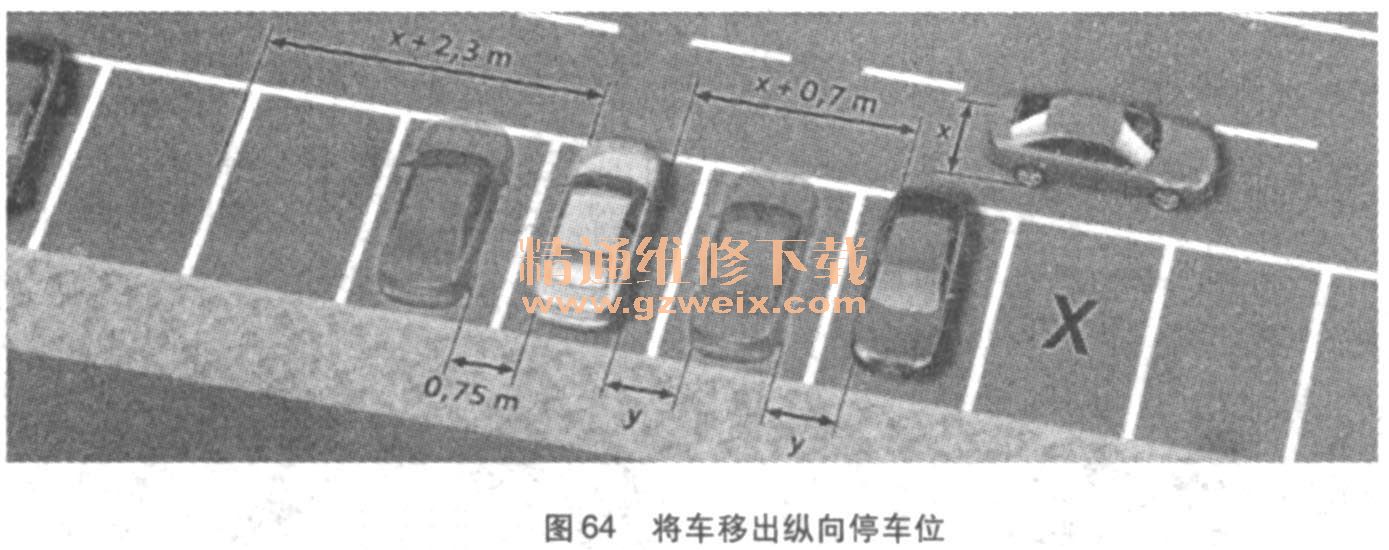
第二代驻车转向辅助系统将车移出纵向停车位(如图64所示):、停车位的宽度必须是车宽X+0. 7m。车辆驶过横向停车空位时的车速低于20km/h,才会去识别这个车位是否合适。使用前面两个驻车转向辅助传感器测量停车空位的长度和深度。可识别的停车空位可以是两车之间或者一车之后,但不能在一车的前方。按下按钮E581一次就可以激活横向驻车转向辅助系统。车位宽度足够宽时,车辆会平行且临近另外一辆车停车,并保持两车间距0. 75m。在两车之间停车时,车辆会与相邻车辆对齐,后部的两个驻车转向辅助传感器负责与相邻车辆对齐。
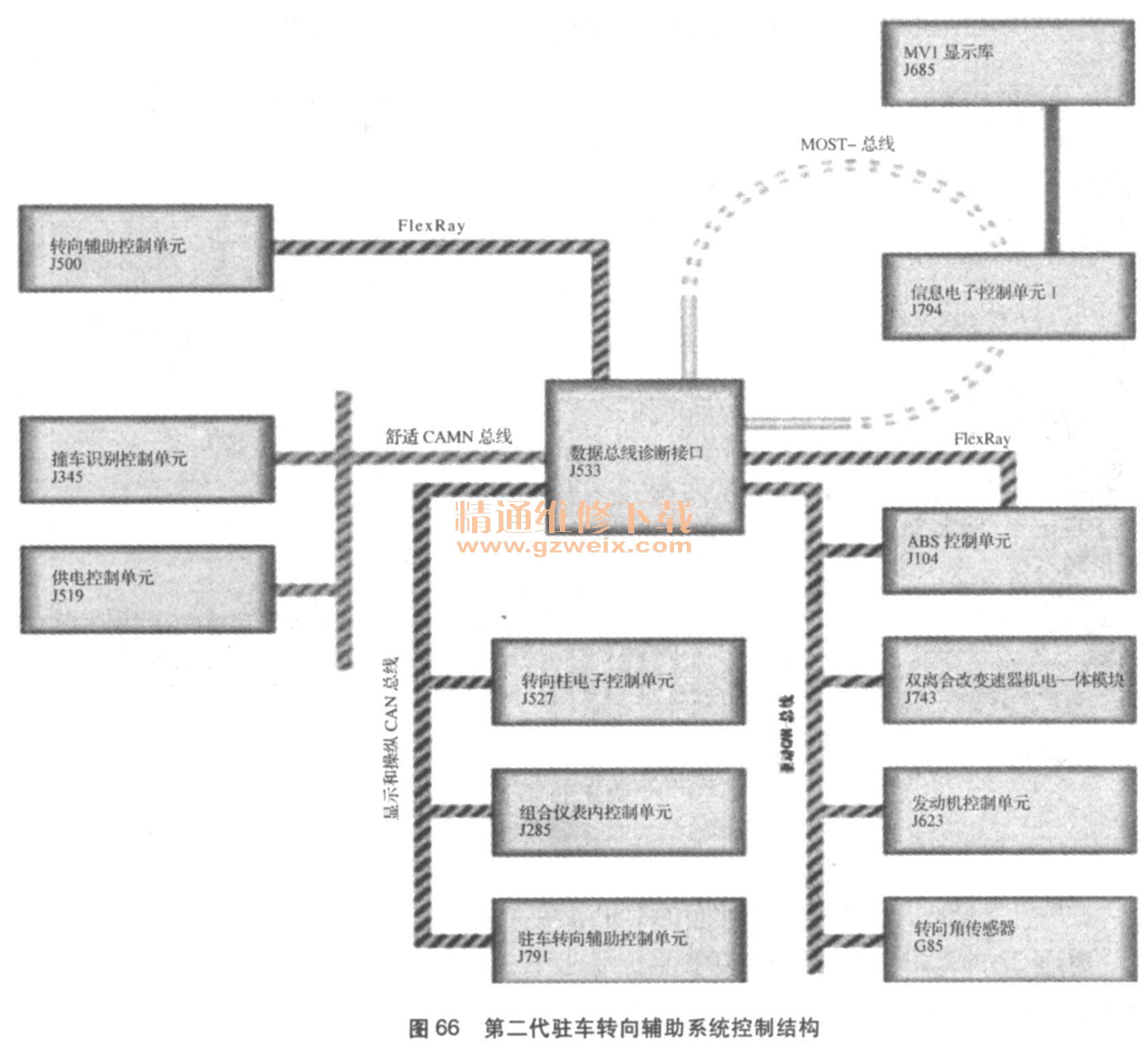
第二代驻车转向辅助系统控制结构如图65、图66所示。

ESP维修保养范围:控制单元在线编码。通过转向柱电子控制单元J527进行转向角传感器G85的校准基本设定。通过传感器电子控制单元J849进行G251(纵向加速度传感器)和G200(横向加速度传感器)的校准基本设定。首次通过F1exRay数据总线进行诊断。对G294(启动-停止用的制动助力压力传感器)的电气故障诊断由ESP控制单元来进行,其数据可靠性验证由发动机控制单元来进行。ESP控制单元通过单独导线来读入数据,发动机控制单元通过CAN总线来读入数据。
")
")
")
")

