・上一文章:汽车零件号的编制规则及解读技巧
・下一文章:第3a代防盗系统和第4代防盗系统区别
三、离合器自适应闭环控制功能
由于奥迪01J型cvT变速器发动机扭矩传递时,采用的湿式离合器组件而不是液力变扭器,因此在整个动力传递中就没有液力传递过程即软连接功能。这样离合器在其工作中一定要确保安全性(原地挂动力挡、起步及制动停车等),其次才是舒适性的保证。因此,为了在离合器使用寿命之内能够舒适地完成离合器的启动和释放过程(离合器的控制质量),必须不断地借助离合器的匹配方法来完成离合器的自适应工作。
在实际维修中当我们修正了离合器间隙、离合器密封性、更换了离合器总成、阀体总成以及电脑等部件后,都必须要重新学习并建立离合器的自适应值,该过程其实也是一个闭环控制过程。不过在具体操作时大家掌握的方法还有差异,甚至有些技术人员还没有深刻了解。下面我们从两个方面(两种学习方法)来学习和了解。
1.离合器爬行模式下的匹配
与AT变速器不同,奥迪01J型cvT变速器,一般也有“起步挡离合器打滑自适应功能”,不同的是AT变速器是在原地挂挡而没有行驶情况下完成的离合器打滑自适应过程,而奥迪cvT变速器则是通过爬行功能来完成的离合器打滑自适应过程,其目的是通过这种匹配学习功能来获得离合器的最佳控制质量(图6)。具体分析如下:新车出厂时变速器电脑已经设定好离合器匹配标准范围值,只要离合器或控制系统没有超出其极限控制范围,那么电脑就能够借助自适应方法来不断地学习离合器的控制质量。随着离合器的使用寿命逐渐达到终结时,或电子液压控制系统出现跟离合器匹配信息严重偏差故障时,电脑就会设定相应的关于离合器自适应匹配达到极限的故障码,从而通过修理才能解决,修理过后再重新通过匹配自适应功能的操作方法来达到离合器使用时的最佳控制质量。

具体匹配方法如下:发动机在标准怠速下(760~800r/min)、变速器油温处于60~100℃之间且两个系统均没有故障码存储。此时需要找一平整路段,踩住制动踏板,挂入前进挡后松开制动踏板,不要驱动加速踏板,借助发动机怠速扭矩让车辆爬行,爬行大概约5~10m后缓慢制动停车且带挡保持10s,再次松开制动让其爬行5~10m。这一个过程反复完成5~6次即可;利用同样的方法完成倒挡制动器在爬行模式下的匹配自适应过程。
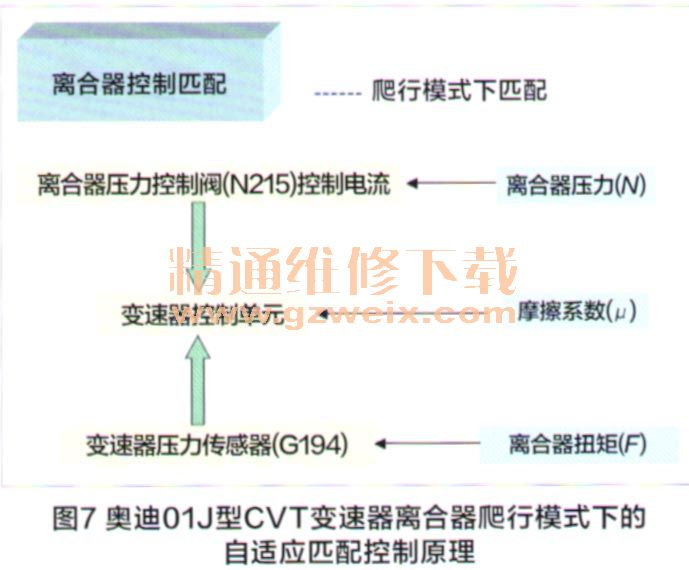
从图7来看关于离合器爬行模式下自适应匹配的闭环控制功能,其实电脑并未以G193为主要参考信息,而是以G194为主要参考信息并通过对N215电磁阀电流的修正借助于离合器的打滑完成了其爬行模式下的匹配自适应功能。因为这个过程也是离合器起步爬行扭矩控制过程,第一要确保发动机怠速转速下的输出扭矩是可靠的,第二就是离合器的控制油压所形成的离合器待传递扭矩,第三就是链条夹紧力,此时需要的是合适的链条夹紧力,既不能过高也不能过低,过高相当于自行车链条过于太紧影响并降低起步扭矩,从而导致车辆因爬行扭矩不足而不能行驶;过低链条打滑同样消耗了离合器待传递扭矩而车辆同样不能行驶。因此,大家不难看出在起步扭矩控制阶段,或离合器在爬行模式下的匹配自适应中G194角色的重要性。当然,电脑在完成闭环控制功能中,也参考了摩擦片及cvTF润滑油的摩擦系数信息。
2.离合器在部分负荷状态下的匹配
这一匹配自适应功能,我们完全可以理解大AT变速器的换挡自适应,但不同的是它仍然是通过发动机的部分输出扭矩,在离合器存在微量打滑情况下的匹配自适应过程。离合器的匹配自适应的条件建立在离合器微量打滑基础上,即车速过快离合器完全接合,不存在打滑信息,那么离合器就不会完成匹配自适应过程。
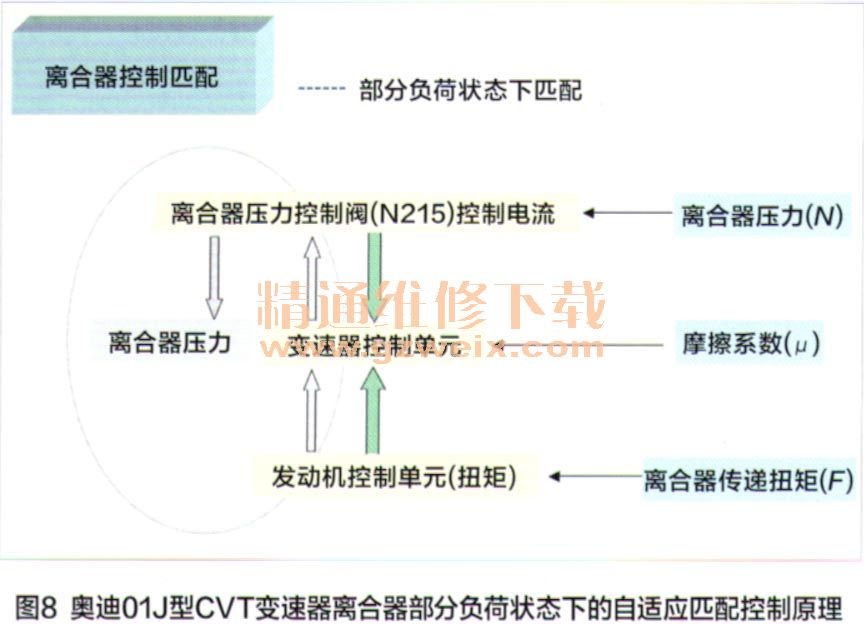
从图8中我们可以看出变速器完成这一学习功能的目的,是借助于特定的发动机输入扭矩,通过N215电磁阀的电流所形成的离合器油压,并在离合器处于微量打滑下得到最佳的舒适性接合和分离控制要求。
具体匹配方法如下:发动机在部分负荷状态的输入扭矩、变速器油温处于60~100℃之间且两个系统均没有故障码存储。此时需要找一平整路段,踩住制动踏板挂入前进挡后,松开制动踏板轻微踏下加速踏板,借助发动机部分负荷下的输入扭矩让车辆行驶,行驶大概50~100m左右距离后缓慢制动停车且带挡保持约10s,再次松开制动加速让其行驶50~100m。这一个过程反复完成5~6次即可;利用同样的方法完成倒挡制动器在发动机部分负荷状态模式下的匹配自适应过程。这个学习过程可在数据流第十组(前进挡)和第十一组(倒挡)中显示,针对2005年以前的老款车型,其匹配自适应成功信息会保留很长一段时间,而2005年之后的车型由于软硬件的变化,当我们看到匹配自适应成功信息后,再重新启动发动机后该信息又显示“正在匹配运行”,这是正常的,因为电脑有不断地学习功能。
")
")
")
")

