・上一文章:三菱帕杰罗空调制冷功能间歇失效
・下一文章:蒙迪欧致胜每次都要按了点烟器后才能正常启动
摘要:本文汇总了10多年来不同国家电动汽车的厂家、所生产的车型、电动汽车的类型、电动汽车驱动电机的种类与控制方式;中国、日本等国家的电动汽车驱动电机多采用永磁同步电动机,从其控制方式出发,对电动汽车驱动电机的转矩控制等加以介绍;阐述永磁电动机控制系统的构成,以及矢量控制与弱磁控制。
1 电动汽车驱动电机与控制的演变
以前,电动汽车驱动电机采用直流电动机,对此可以列出的理由有:作为电源的蓄电池是直流,控制直流电动机速度较容易,结构简单等。时至今日,小型EV(纯电动汽车)及改装的EV也还在使用直流电动机。这些直流电动机大部分是串激型,控制方法为采用斩波器、利用脉冲宽度调制(PulseWidth Modulation,简称PWM)进行电压控制。而对采用通用电动机的,则可以利用外部的可变电阻、发出速度/力矩指令,在指令值的输入侧设置滤波器,采用具有时间常数调整功能的驱动控制。
但另一方面,普通汽车厂及电动汽车厂生产的驱动电机一般为交流电动机。欧美厂家大多数倾向于采用感应电动机,中国与日本等国家一般采用永磁交流同步电动机(以下简称PMSM)。
在20世纪90年代初期,感应电动机占据了EV驱动电机的主流。此后Unique Mobility公司开发出新结构的PMSM,其采用的是表贴式永磁转子,简称这种电机为表贴式永磁同步电动机,简写作SPMSM(Surface Permanent Magnet SynchronousMotor)。利用由环状烧结永磁体与霍尔元件组成的磁极位置传感器检测磁极位置,以通电角1200的矩形波进行驱动;基于转速和所要求的力矩以提前角和PWM占空比对电机进行控制。同时期本田公司开发的EV-Plus驱动电机也是SPMSM型、矩形波驱动,这两点没有什么变化,但预先将提前角、PWM占空比以及增大的通电角(将120°增大到最大175°)加以变换,基于变换的数据进行控制,其思路与燃油喷射用ECU的思路相同。在当时,因为还不存在具有装车业绩的驱动电机专用ECU (CPU),所以,采用的办法是:以有一定业绩的发动机控制用ECU为基础进行开发。1998年开始销售的本田最早的混合动力车(简称HEV)Insight驱动电机也是SPMSM型,且采用了同样的控制方法。此后,厂家开发出了电机驱动专用ECU。从2002发表的燃料电池车(简称FCV)FCX开始,电机配有了Insight用的智能功率模块,且采用了矢量控制。此电机最基本的控制就是矢量控制,为了提高高转速区的输出功率,还增加了伪单脉冲控制。此后,在2009年发表的FCX-Clarity上,采用了内置式永磁同步电动机,简称为IPMSM(Interior Permanent Magnet SynchronousMotor),实现了高转速化和高功率化。
丰田Prius用电机及电机的控制也随着每次的更新换代在不断地更新,使其性能有了大幅度的提高。1997年发布的第一代丰田Prius上,在IPMSM上采用了矢量控制。此后,进行了更新换代,更新了电动机及其控制方法,提高了输出功率。
在2003年,实施了全面的更新换代:电机为内置式永磁同步电动机(IPMSM)型、配置了V字形永磁体,在逆变器上设置了提高电源电压的升压器,由于提高了DC线路的电压,在高转速、高功率区域大幅度地增加了输出功率。在2009年,全面地实施了第2次更新换代;以前,发电机定子采用的是分布绕组,借此机会,改为凸极集中绕组等。从结构上看,也进行了大幅度的更改。
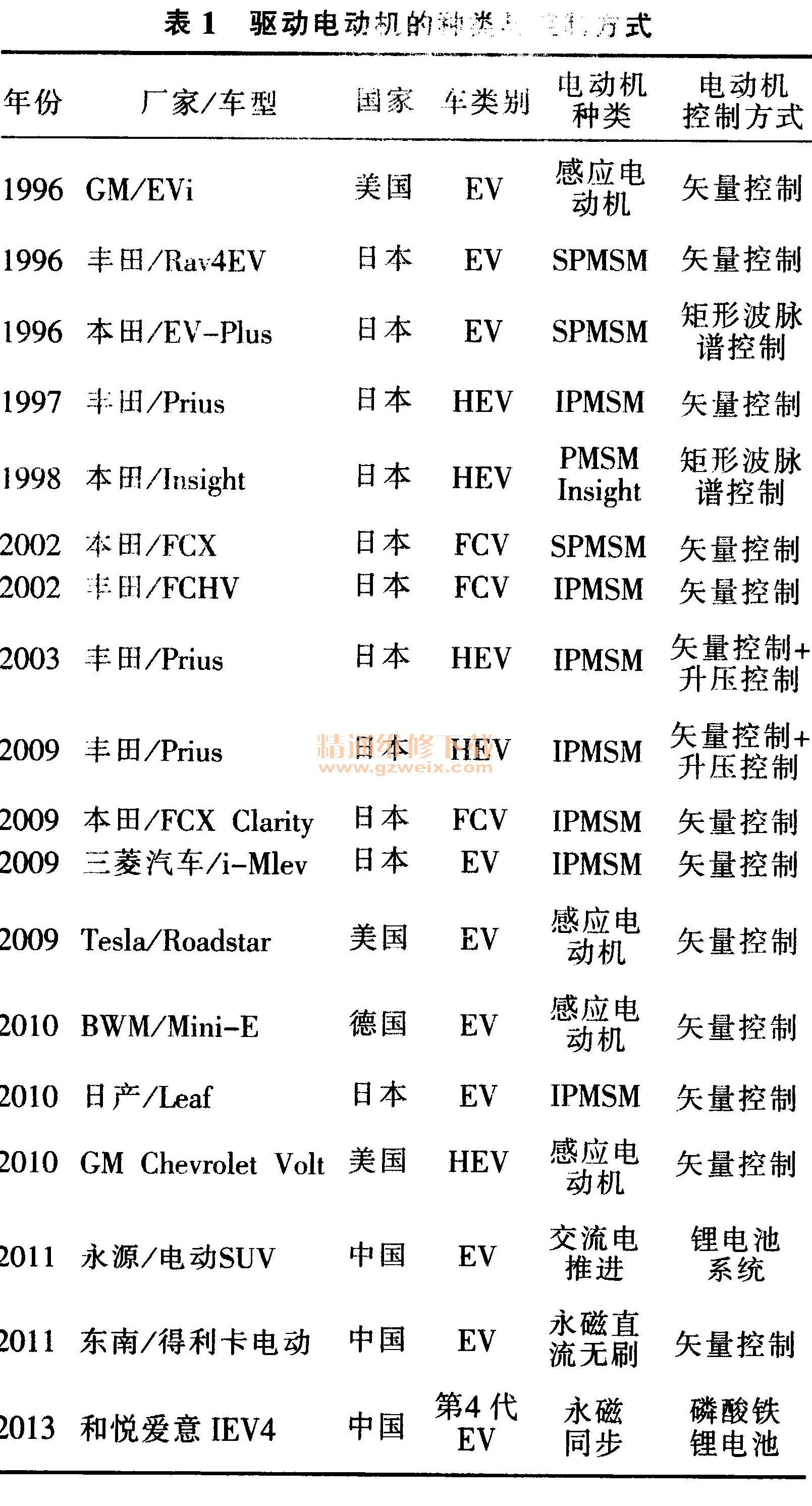
上面已经提到,日本厂家的电动汽车用驱动电机PMSM占主流,其进步非常显著。另一方面,欧美厂家是感应电动机占主流。美国特斯拉公司最新的EV采用的是感应电动机;原预定在2010年末开始销售的GM雪佛兰沃蓝达(ChevroletVolt)用驱动电机采用的也是感应电动机。采用技术的不同,在于受到永磁体、电工钢板等主要材料以及部件厂家、大学、企业对电机的研究等的较大影响。日术厂家主要采用PMSM型的理由有:除了PMSM型的优点之外,高性能钦铁硼永磁体与高性能电工业板的生产厂家集中在日本;在大学及企业PMSM进行卓有成效的研究。而欧美在军事方面掌握着小型高功率感应电动机的技术,但没有造高性能钦铁硼永磁体的厂家等,所以热衷于将应电动机。到2013年为止,已经发布的EV、EVC、HEV驱动电动机的种类与控制方式的汇总表1所示。
2 PMSM的优点
无论哪种电动机都是根据“左手定则”产生扭矩的,让我们回顾一下中学物理课学过的电动机定则内容,这是一个确定通电直导线在外磁场中受力方向的定则。其方法是:伸开左手,使拇指与其余四指垂直,并都与手掌在同一平面上。设想将左手放入磁场中,使磁力线垂直地进入手心,其余四指指向电流方向,这时拇指所指的方向就是磁场对电
作用力的方向。对PMSM来讲,已经确定磁通是由永之久磁铁形成,称磁通的这一方向为d轴,只要在与d轴垂直的方向(即q轴方向)有电流通过就可以满足左手定则的条件,称此电流为q轴电流。与此相比,对感应电动机来说,除了q轴电流之外,为了维持足够的磁通、d轴方向上还需要有电流通过,称此勺、流为d轴电流。由此可以看出:永磁电动机通过较小的电流就可以产生所需要的扭矩,减少了损耗。效率非常高的驱动系统对电动汽车来说是非常具有吸引力的。
从结构上来看,永磁电动机有两个特点:一是转子上的永磁体可以采用内置式结构;二是可以实现多极设计。
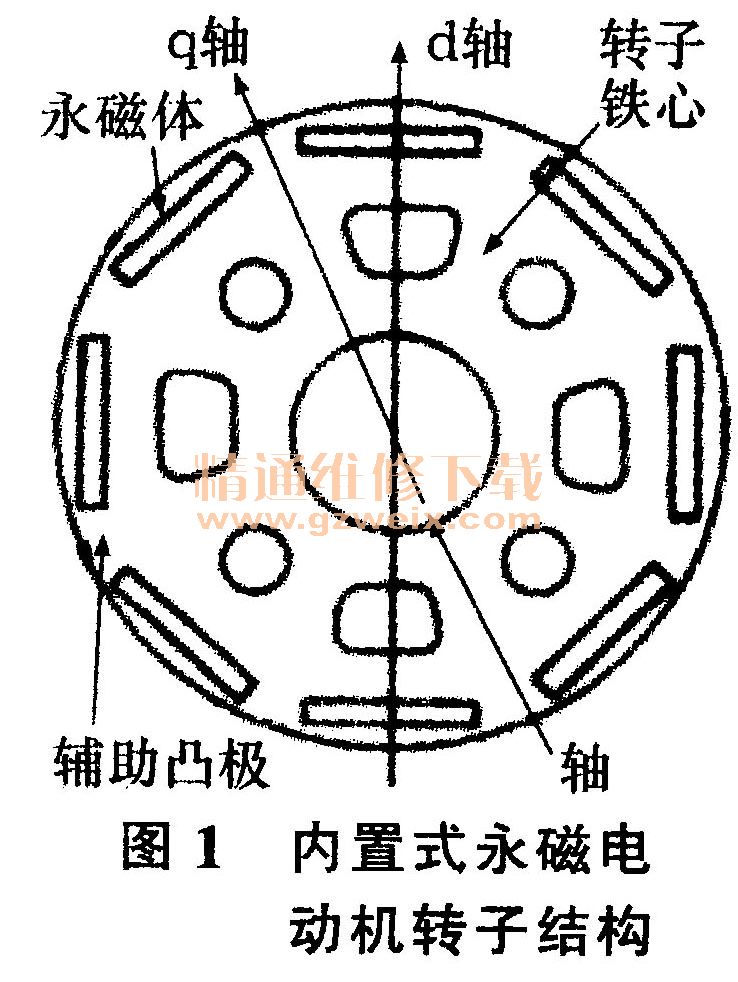
图1是永磁电动机转子结构一个例子。老式永磁电动机转子上的永磁体一般采用表贴式结构,较新式的永磁电动机多半采用内置式结构。其理由有两点:与永磁体粘贴在转子表面相比,埋入在转子内部的场合下,可以防止高速旋转时永磁体出现散落;因此,设计电动机时,转子的转速可选10 000 r/min以上。
此外,配置永磁体的磁路中存在有气隙,永磁体产生磁通的d轴方向与永磁体之间q轴方向的自感不同。也就是说,在q轴方向上存在凸极的转子上,当有d轴电流与q轴电流时,就有磁阻转矩产生。如能将与磁通垂直的q轴电流产生的电磁转矩与磁阻转矩加以合成的话,就可以增大电动机的最大转矩。换句话说,对所要求的最大转矩,采用合适的转子结构,可以进一步减小电动机的体积。
永磁同步电动机产生的转矩可以用公式(1)表示,第1项是永磁体磁通(Pa与q轴电流礼所产生的电磁转矩;第2项是因凸极而形成的磁阻转矩,其大小和d轴自感与q轴自感之差成正比。

式中:Pn—极对数;φa一电枢交链的永磁体产生的磁通;Ld、Lq----d、q轴的自感。
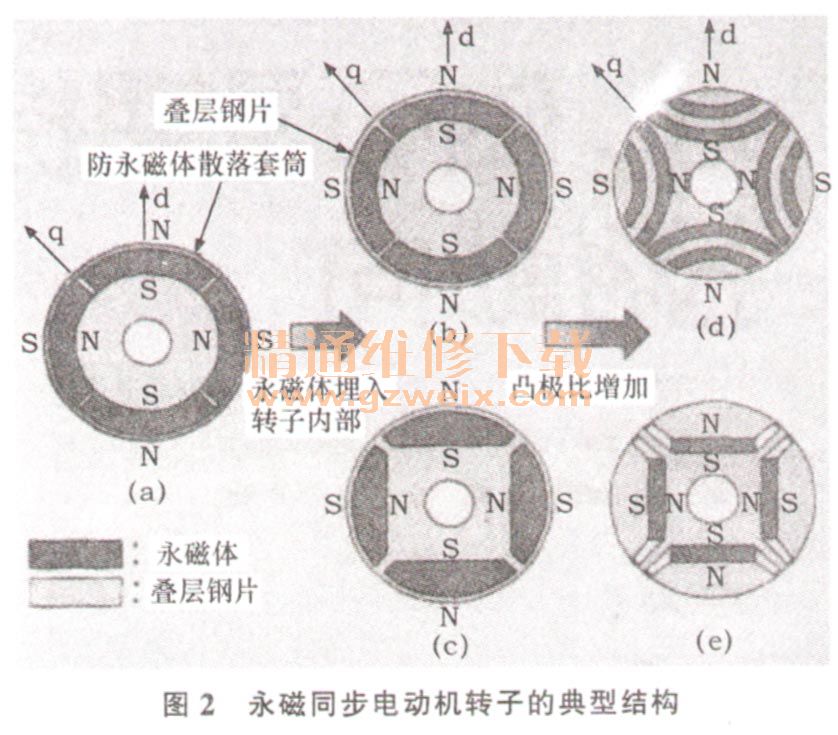
要想提高永磁电动机的功率,可寄望于通过增加电磁转矩实现高转矩、高效率及小型化;另一方面,通过在转子结构上下功夫以及永磁体布置的最佳化,还可以进一步增大永磁电动机的功率。永磁同步电动机转子的典型结构如图2所示,图2中的b-e被广泛地用于非常重视效率的EV及HEV用高效电动机上。内置式转子上不需要表贴式转子上防疚永磁体散落的不锈钢套筒,因此可以大幅度地降公传子表面的涡流损耗。内置式转子采用的是Ld<Lq的道凸极型结构,若采用图2中的b、e结构,就可以提高凸极率Ld/Lq磁阻转矩的增加也可以增加转矩、提高效率。
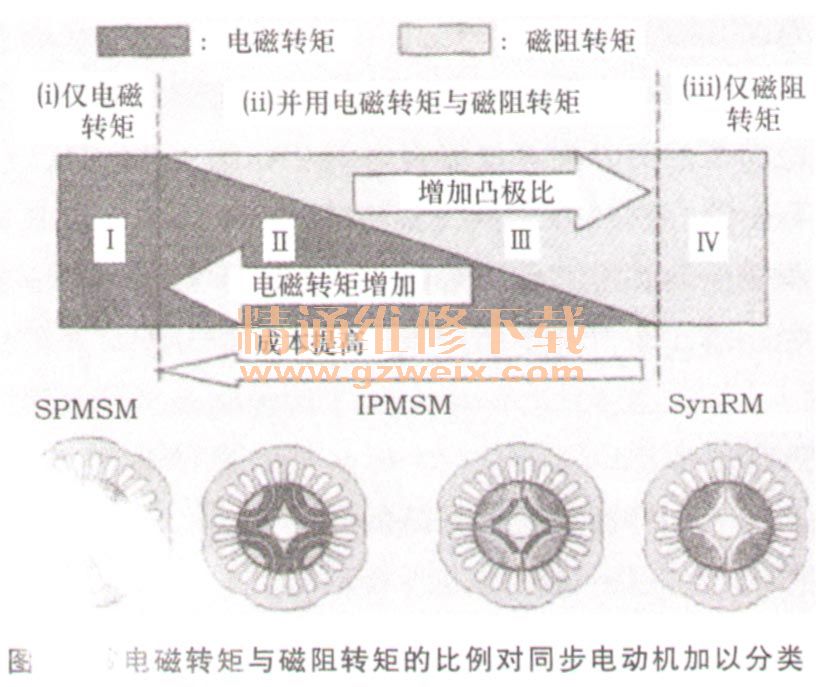
就内置式永磁电动机来讲,永磁体的形状及转子内永磁体的布置等的自由度还是比较大的,通过永磁体种类及用量的选择、转子形状的设计,可以调整电磁转矩与磁阻转矩的比例。按电磁转矩与磁阻转矩的比例对同步电动机加以分类,所得结果如图3所示。图3中的I区是仅利用电磁转矩的SPMSM ,W区是不用永磁体仅利用磁阻转矩的同步磁阻电动机,简称为SynRM (SynchronousReluctanece Motor), IPMSM是利用两方转矩的电动机。以前设计IPMSM时,主要是利用永磁体形成的电磁转矩,辅助性地运用磁阻转矩(区域II的电动机)。为了使永磁同步电动机高速运转,在超过额定转速时,则实施通过负d轴电流的等价的弱励磁控制,即弱磁控制。但是,速度越高就需要越大的弱磁电流,这样一来,铜损的增加将导致效率降低,同时逆变器截止时还会出现过电压等问题。
")
")
")
")

