3 车载网络的特性
车载网络是将汽车上各电控单元联系起来,使各电控单元之间高效传递信息、相互配合、协调工作、共同完成各种控制功能的重要纽带和桥梁。熟悉
车载网络的特性,对于我们判断
车载网络是否正常工作、各电控系统与
车载网络相关联的故障具有重要意义。下面对雪铁龙轿车
车载网络的主要特性说明如下。
3.1 网络的唤醒与休眠
车载网络的主要任务是汽车运行时,在各电控单元之间传递信息,帮助各电控单元完成各种控制任务。一般点火钥匙在点火档(包括起动档),
车载网络就被唤醒进人工作状态,开始传递信息;一般发动机熄火后,断开点火开关1 min以后,CAN高速网就进入不工作的休眠状态;断开点火开关,网络上所有电控单元不工作1.5 min左右以后,CAN车身网和CAN舒适网就进人不工作的休眠状态。
车载网络休眠的目的主要是为了在汽车各电控系统不工作时,节约
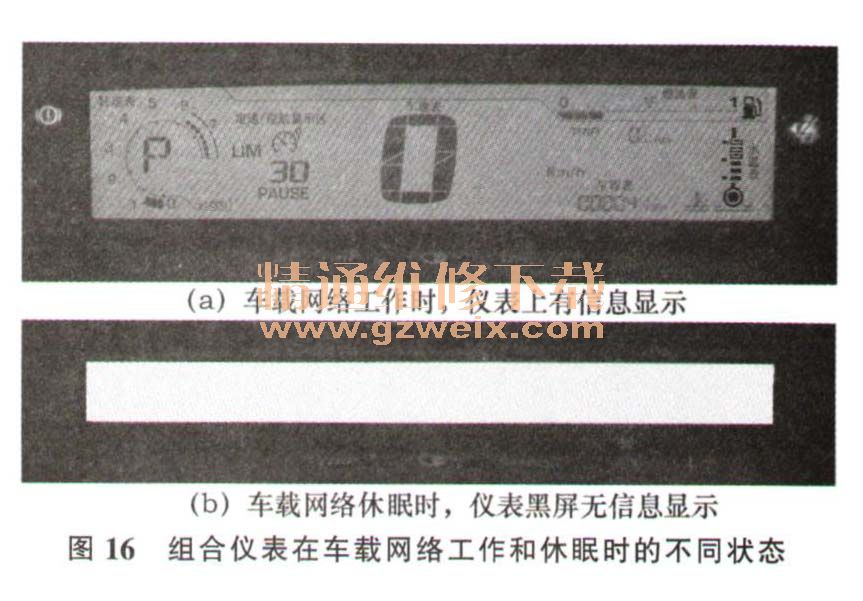
蓄电池的电能。判断网络唤醒和休眠的简单方法是:仪表上有信息显示时,表示网络处在唤醒的工作状态;一般在组合仪表黑屏无信息显示时,表示网络处在休眠的状态,如图16所示。
 3.2 CAN高速网的特性
3.2 CAN高速网的特性
CAN高速网又称为动力网,它主要包含发动机
ECU、自动变速器
ECU、 ESP电控单元等,由于发动机喷油、点火的时间周期只有短暂的几毫秒,所以要求CAN高速网传递信息的速度很快(CAN高速网的速率为500 kb/s)。
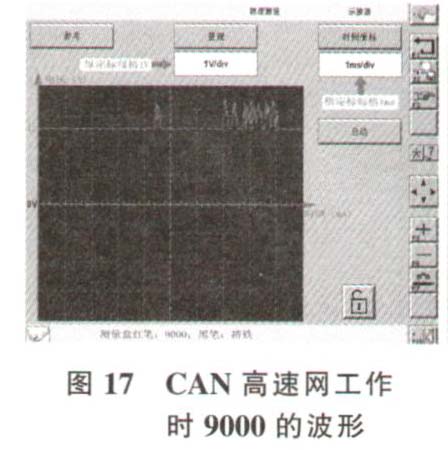
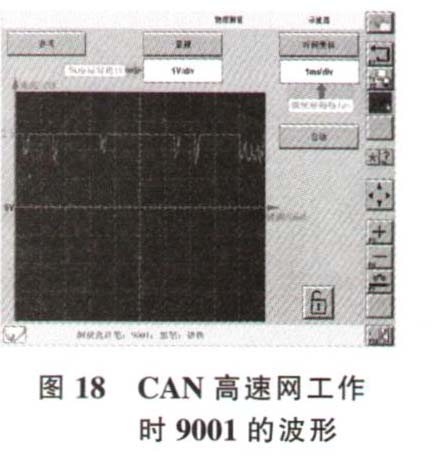
CAN高速网工作时,9000(CAN4-1)、9001(CAN-L)的波形如图17-18所示,休眠时无波形。
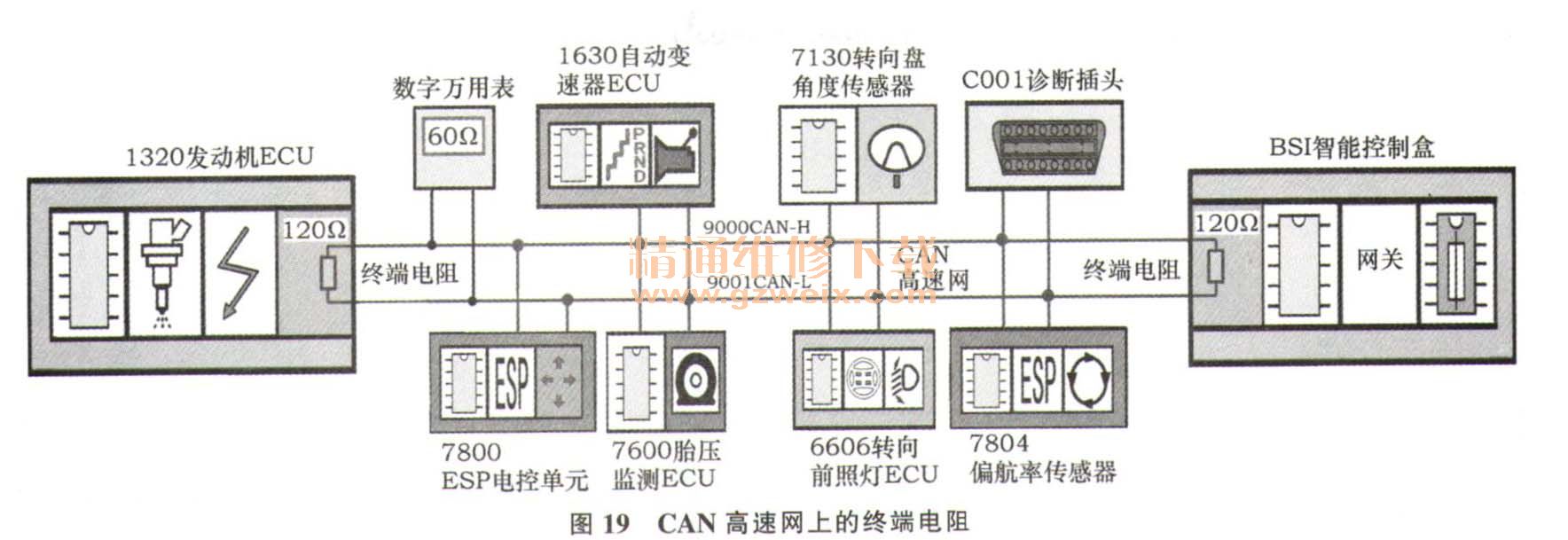
为了防止信号在网络上反弹,发动机
ECU和智能控制盒被安排在CAN高速网的两端,它们内部各有一个120Ω的电阻,如图19所示。这2个电阻的作用是使信号从一端传递到另一端后被吸收掉,以防止前一个信号反弹回来后,对后一个信号造成干扰。
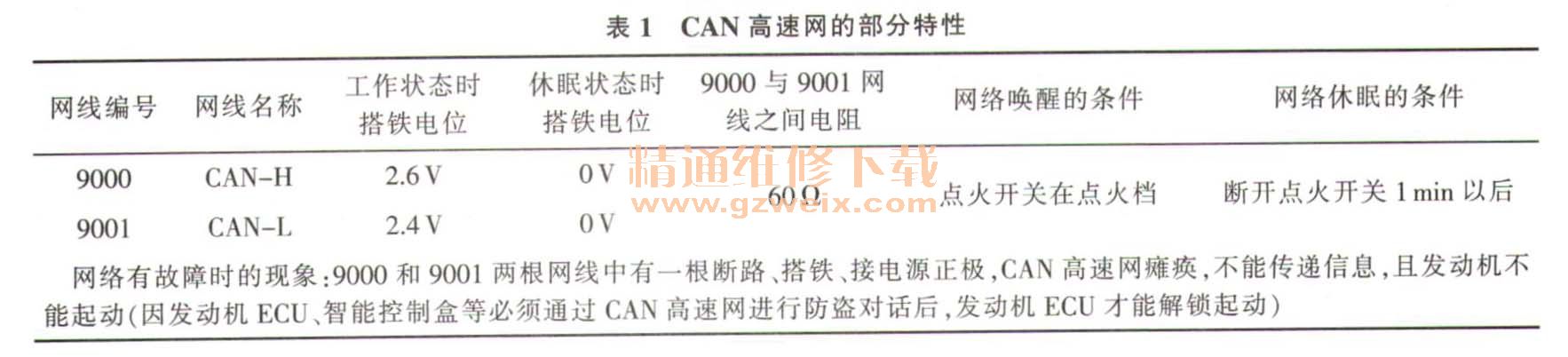
CAN高速网的部分特性见表1。
 3.3 CAN车身网的特性
3.3 CAN车身网的特性
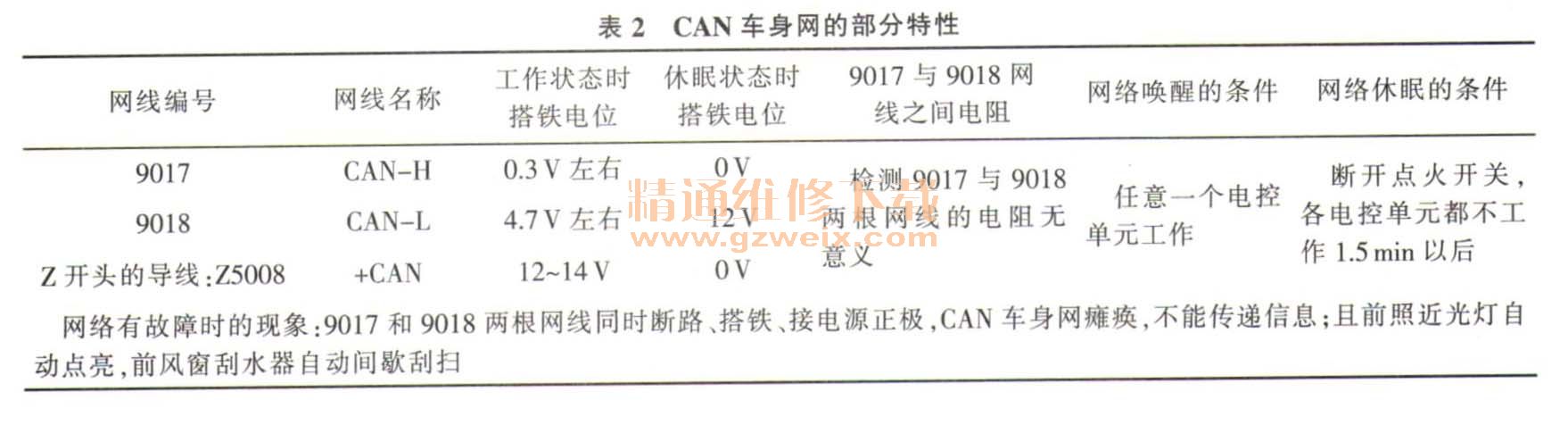
CAN车身网主要包含智能控制盒BSI、安全气囊6570等管理车辆安全性功能的电控单元,它的传输速率为250 kb/s。AN车身网的部分特性见表2。CAN车身网的工作时的波形如图20-21所示,休眠时无波形。
 3.4 CAN舒适网的特性
3.4 CAN舒适网的特性
CAN舒适网主要包含智能控制盒BSI、组合仪表0004、空调
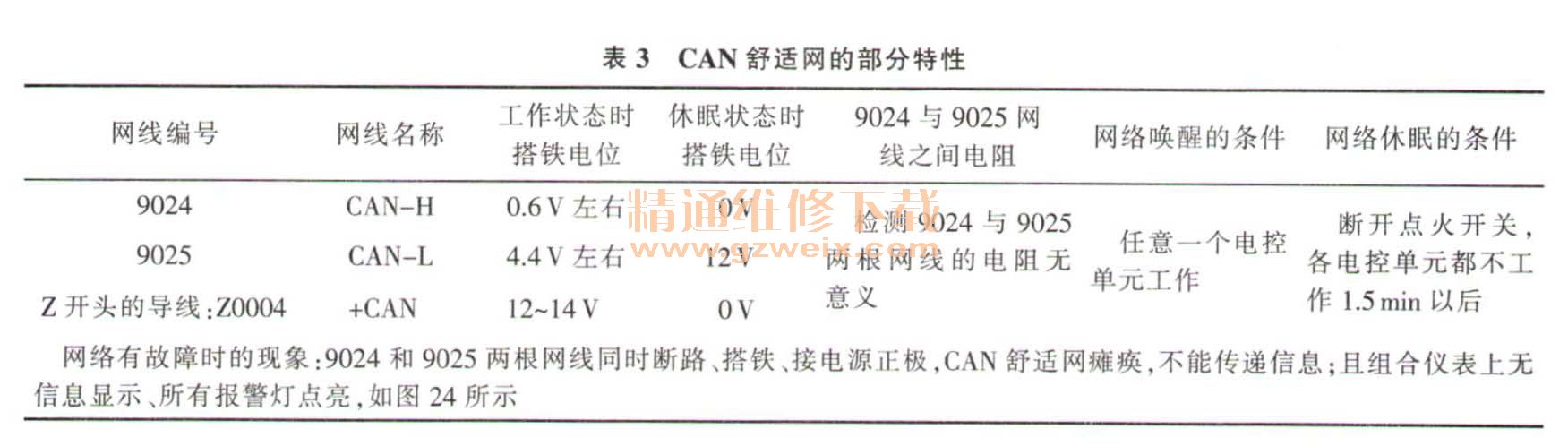
ECU等管理车辆舒适性功能的电控单元,它的传输速率为250 kb/s。CAN舒适网的部分特性见表3。AN舒适网工作时的波形如图22-23所示,休眠时无波形。
 3.5 LIN网的特性
3.5 LIN网的特性
LIN网主要包含转向盘上控制模块VMF、左刮水器
ECU、右刮水器
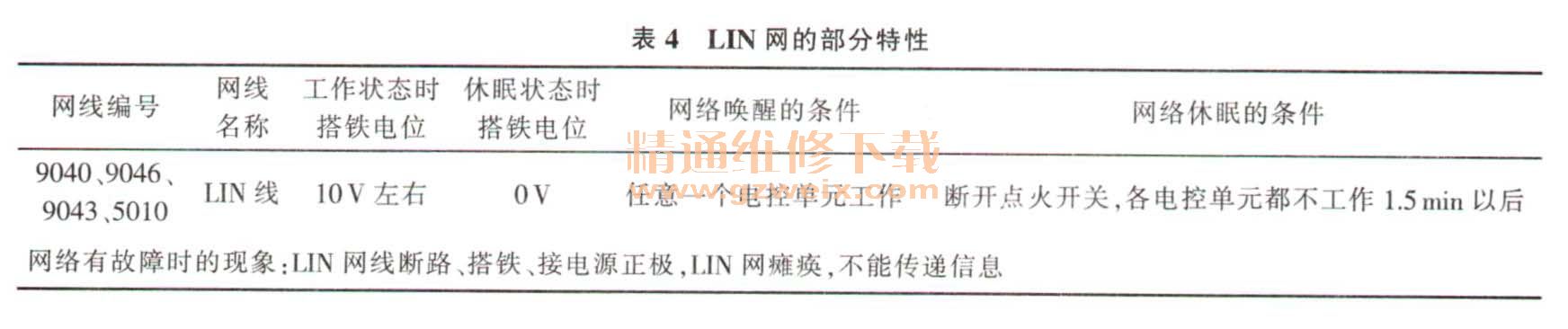
ECU等信息传递速度要求不高的电控单元,它的传输速率为19.2 kb/s。LIN网的部分特性见表4。LIN网的工作时的波形如图25所示,休眠时无波形。与唤醒;②LIN网比CAN网传输速率低很多,汽车上使用LIN网的主要原因是LIN网比CAN网的成本低,在能满足使用要求的前提下,尽量使用LIN网,以节约成本。


上一页 [1] [2] [3]
")
")
")
")

