(三)控制原理
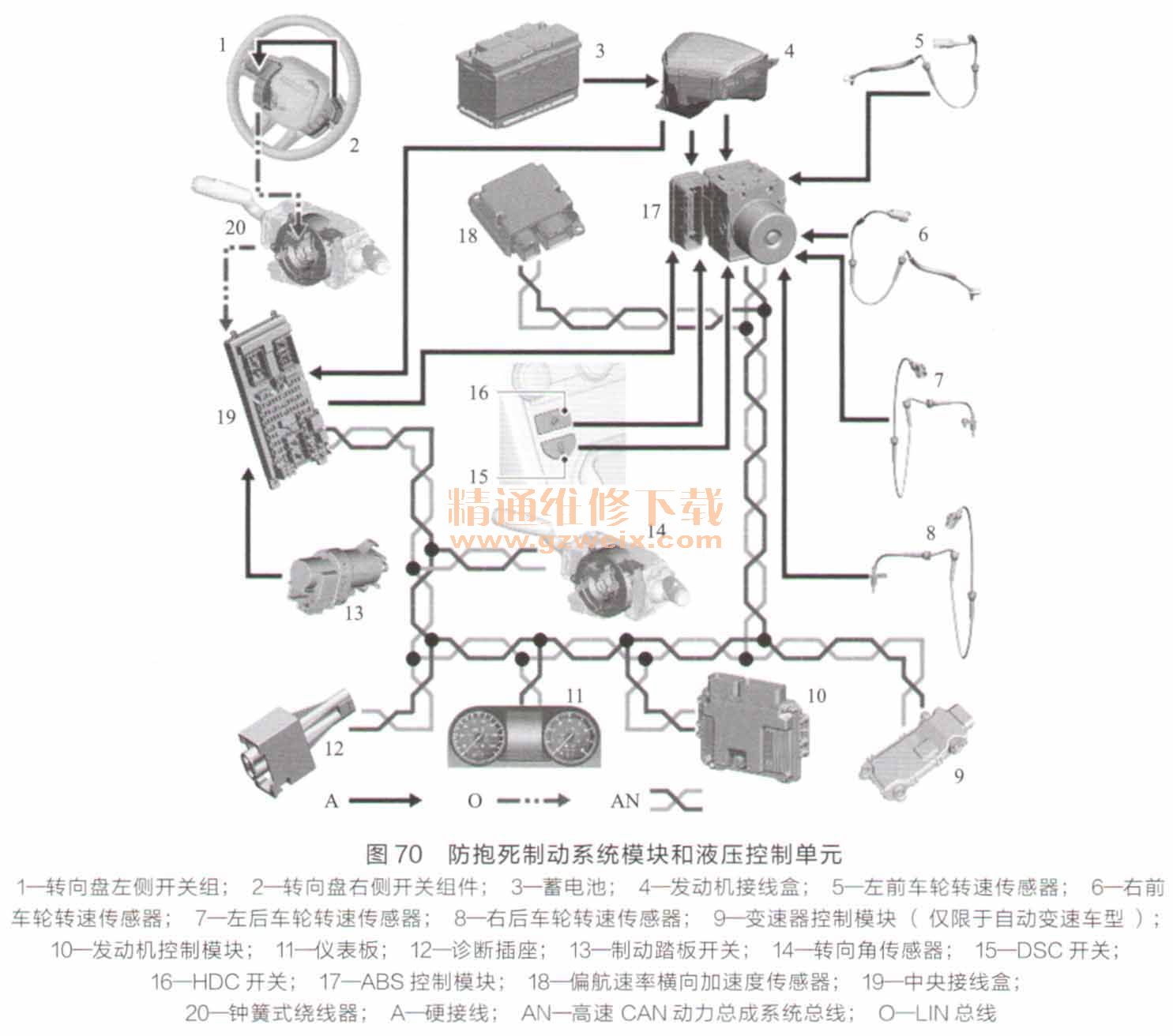
防抱死控制和牵引控制系统电控流程如图70所示。
在防抱死制动控制模式下,系统对每个车轮单独进行制动压力调节。
在弯道制动控制模式下,系统通过限制车辆一侧的制动压力来产生矫正扭矩,辅助车辆实现驾驶员请求的转弯半径。
在动态稳定性控制模式下,系统采用液压制动方式和动力扭矩控制方式来维持车辆的横向平稳性。
在
电子制动力分配模式下,系统限制施加至后轮的制动压力,从而减小后轮与路面之间的摩擦。
在电子牵引控制模式下,系统通过减小发动机扭矩或向空转车轮施加制动来优化牵引力,直至重新获得良好的牵引力。
在发动机拖曳扭矩控制模式下,系统可防止由下列情况引起的车轮打滑:突然松开加速踏板时发动机扭矩的突然减小,手动挡车辆降挡后离合器的突然接合。使用自动变速器车辆上的拨杆开关进行的降挡。
在陡坡缓降控制模式下,系统采用发动机制动和制动干预等方式来控制在低速越野下坡和附着力差的路面上的车速及加速度。陡坡缓降控制模式可在任何车速时选择,但仅在车速低于50km/km时才能启用。
无论陡坡缓降控制模式是否启用,在坡度大于5%的陡坡上,系统都会协助驾驶员从释放制动踏板平稳过渡到起步。控制方式是通过保持驾驶员产生的制动压力一小段时间(2~3s),然后通过驾驶员踩下加速踏板时产生的推进扭矩来平衡制动扭矩,以确保车辆不会向后滚动。
当连接拖车电气插座时,拖车稳定性辅助控制功能将被激活,系统将提高动态稳定控制和牵引效果。
(四)故障诊断与测试
1.目视检查
防抱死控制和牵引控制系统的目视检查内容见表8。

2.发动机关闭时检查制动踏板行程
将点火开关关闭。踩下制动踏板6次,然后踩住制动踏板。检查制动踏板行程是否缩短并且踩下时阻力较大。
如果制动踏板行程缩短并且踩下时阻力较大,那么进行发动机运转时的制动踏板行程检查工作。
如果制动踏板行程没有缩短且踩下时阻力并不大,那么检查制动助力器的真空管路。启动发动机并怠速运转3min,关闭点火开关位置,然后重新检查制动踏板行程。如果制动行程没有缩短且踩下时阻力并不大,则检查制动助力器是否存在故障。
3.发动机运转时检查制动踏板行程
踩住制动踏板,启动发动机。检查发动机启动时制动踏板行程是否增加。如果制动踏板行程增加,则说明制动助力器真空性能正常,继续检查系统的故障码。如果制动踏板行程没有增加,则检查制动助力器的真空管路。
上一页 [1] [2] [3] [4] [5] [6] 下一页
")
")
")
")

