②C1C3
C1工作可使前排的速度↓0传递至后段的小太阳轮,而C3工作可使后段的一体行星架具备输入轴速度1。这样在拉维娜结构中,双级行星排的行星架以输入轴速度1作为主动元件,小太阳轮以↓0速度作为受限元件,则公共齿圈的整体输出速度为减速。但此时受限元件小太阳轮的顺时针旋转又会提高从动元件公共齿圈的转速,所以得到公共齿圈的输出速度为↓+(角标+,意味着当前复合速度比角标为。时有所提高),如图6所示。

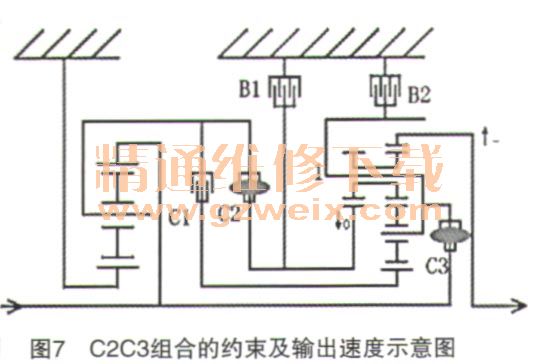
③C2C3
C2工作可使前排的速度牛。传递至后段的大太阳轮,C3工作可使后段的一体行星架具备输入轴速度。这样拉维娜机构中,单级行星排的行星架以输入轴速度1作为主动元件、大太阳轮以牛。速度作为受限元件,则公共齿圈的整体输出A度为超速。但此时受限元件大太阳轮的顺时针旋转会降低从动元件公共齿圈的转速,所以得到公共齿圈的输出速度为↑-(角标-,意味着当前复合速度比角标为。时有所降低),如图7所示。
④C1B1
C1工作可使前排的速度↓0传递至后段的小太阳轮,B1工作可固定后段的大太阳轮。按齿轮啮合原理进行速度分析可知,长得星顺时针(S)转动(这与C1C2工作状态行星齿轮的转动状态下相似)。
此时大太阳轮固定,长行星轮沿着大太阳轮的)顺时针转动会导致行星架会相对于大太阳轮做顺时针公转,如图8所示。

此时再回到双级行星排中,我们发现小太阳轮依然是顺时针旋转,而行星架则应是顷时针减速旋转的状态。
那么当前小太阳轮以↓0速度作为主动元件、一体行星架顺时针转动作为受限元件,则公共齿圈的整体输出速度为减速。受限元件一体行星架的顺时针旋转会提高公共齿圈的转速,所以得到公共齿圈的输出速度为↓0·↓++,如图9所示。

⑤C1B2
C1工作可使前排的速度↓0传递至后段的小太阳轮,B2工作可固定后段的一体行星架,则拉维娜结构的双级行星排中,小太阳轮主动速度为丰。,一体行星架固定,所以公共齿圈的输出速度为减速,记作↓0·↓0,如图10所示。

上一页 [1] [2] [3] 下一页
")
")
")
")

