⑥C2B1
C2和B1的约粼中突。
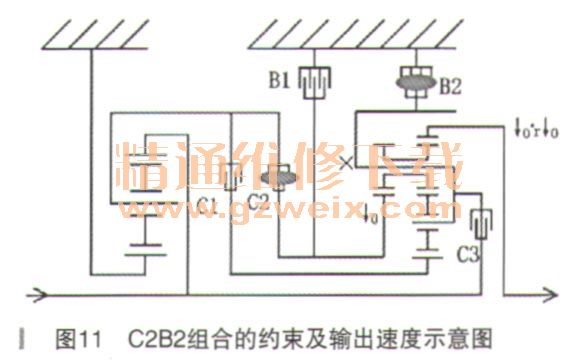
⑦C2B2
C2工作可使前排的速度↓0传递至后段的人太阳轮,B2工作可固定后段的一体行星架。此时拉维娜机构的单级行星排中,太阳轮主动速度为↓0,一体行星架固定,所以公共齿圈的输出速度为反向减速,记作↓0·r↓。0(左侧符号r表示输出速度与输入速度方向相反),如图11所示。
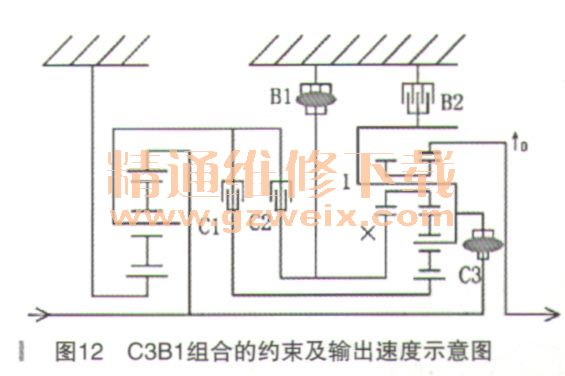
⑧C3B1
C3工作可使后段的一体行星架具备输入轴速度1,B1工作可固定后段的大太阳轮。此时拉维娜结构的单级行星排中,一体行星架以输入轴速度1作为主动元件,大太阳轮固定,则公共齿圈输出速度超速,记作↑0,如图12所示。
⑨C3B2
C2和B1的约束方式冲突。
⑩B1B2
当前约束方式下导致输出轴锁死。
3.速度标记的对比分析
由此总结出各速度标记,并按速度由低至高进行排列挡位,如表所示。

上一页 [1] [2] [3]
")
")
")
")

