・上一文章:东风康明斯汽车离合器打滑
・下一文章:纯电动客车打气泵的故障诊断与保养
三、实验与结论
1.实验
本设备采用日本欧姆龙可编程控制器控制步进电机和直线电机运行,根据通讯协议把程序分为参数初始化、手动、自动、输出、急停&手自切换处理、END程序。步进电机控制电动转台转动,直线电机控制平台运动。
如图8所示,我们可以在人机交互界面直接设定动头运动的加速度、位移及判断条件等参数。在发出运动开始命令后,动头将在伺服控制下按照其指定的加速度、位移等参数完成运动。而运动过程中通过访问伺服控制器可以获得直线电机动头运动的实际速度。通过检测安装在动头上的加速度传感器数据,可以获得加速度值。通过检测安装于夹具前方的负荷传感器的数据,可以得到负荷的数值。
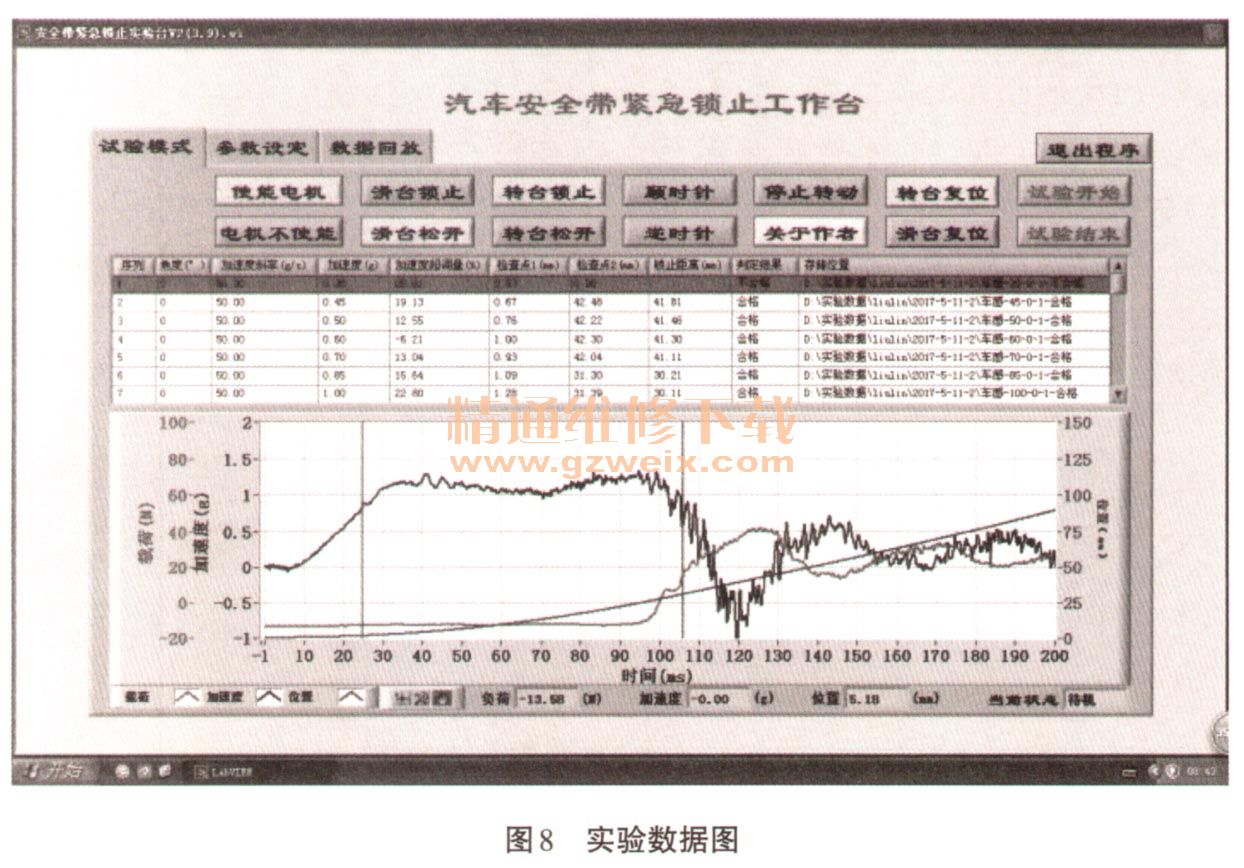
加速度传感器和位移传感器为我们实时测出加速度值和位移值,车感实验开始时通过检查织带上的2个固定点算出锁止距离,再根据表1对锁止的要求判定此次实验是否锁止。
2.结论
(1)本研究提出用进口高强度合金卷收器夹具、织带夹具、控制系统配合使用可以完成车感实验。卷收器夹具通过调整可以改变卷收器安装角度完成不同的车感实验;织带夹具可以测出安全带织带张力、固定安全带自由端、缓冲织带。
(2)本试验台采用Kollmorgen直线电机带动高精度直线运动平台完成加速度的改变;采用旋转步进电机实现转向台角度的调整;采用欧姆龙PLC编写下位机程序;采用Labview编写上位机程序。试验结果验证了本试验台具有良好的实用性。本试验台可以降低整车厂或者安全带零部件供应商生产成本。
")
")
")
")

