一、前方防碰撞辅助系统的定义及发展历程
前方防碰撞辅助系统(Forward Collision Warning,FCW)是通过摄像头、雷达等传感器实时感知车辆前方的物体,并检测车辆与目标之间的距离并警示驾驶员的一种系统。该系统的示意图如图1所示。

20世纪70年代,日本就开始进行了汽车碰撞系统的研究,1999年,本田、丰田、日产三大车厂各自开始开发自己的前车碰撞预警系统,2003年在雅阁中本田首次安装了自己的碰撞缓解制动系统(CMBS),该系统是FCW系统的前身。CMBS系统的工作原理是:当毫米波雷达探测到前方可能有碰撞危险时,便以警告的方式提醒驾驶员,如果继续接近,当系统判断将要追尾时,则会采取自动制动措施。而日本另一大汽车厂商丰田的预碰撞安全系统最早是在2003年安装在雷克萨斯LX和RX车系上,同样也是采取了毫米波雷达作为传感器。欧美对此的研究也不落后,作为全球安全领域的领军者—沃尔沃在2006年的S80上首次安装了碰撞预警系统,通过毫米波雷达来检测车距,发现危险时会提示驾驶员立即制动,同时会推动制动片接近制动盘,以便为驾驶员制动提供最快的操作速度,2007年系统升级后,沃尔沃便增加了自动制动的功能。现在,FCW功能已经成为ADAS系统常见的标准配置。
二、前方防碰撞辅助系统的组成
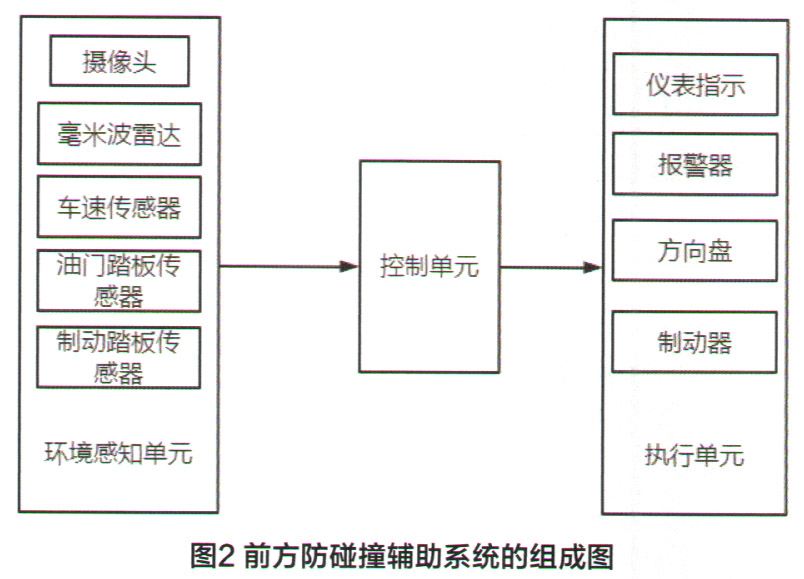
前方防碰撞辅助系统主要由环境感知单元、控制单元和执行单元构成。其系统组成图如图2所示:
1.环境感知单元
环境感知单元主要由摄像头、毫米波雷达、车速传感器、油门踏板传感器、制动踏板传感器组成。该单元的主要作用是对行车环境进行检测,得到车辆的相关环境信息。其中摄像头和毫米波雷达的主要作用是识别及测距;车速传感器用来感测当前车辆行驶的速度;油门踏板传感器用于检测当前方可能发生碰撞危险时驾驶员是否松开油门踏板;制动踏板传感器用于检测驾驶员在接收到前方可能发生碰撞危险时是否踩下制动踏板。
2.控制单元
控制单元可以接受来自环境感知单元的相关数据,对数据进行综合分析后,按照算法处理程序对车辆的当前行驶状态进行计算,判断车辆应使用何种处理工况进行处理,并且将处理信息发送给执行单元。
3.执行单元
执行单元主要由仪表报警器及制动器构成。仪表报警单元接收到控制单元的信号后,将在仪表上通过图标的方式警示驾驶员,并发出警报声,某些车型还会通过振动方向盘的方式警示驾驶员。如果警告发出后驾驶员没有松开油门踏板,制动单元会强制介入,控制制动器对车辆减速,紧急情况下会控制车辆进行紧急制动。
[1] [2] [3] [4] 下一页
关键词:
")
")
")
")

