来源:汽车维修与保养 作者:佚名 2021-12-29 08:24:52
二、超声波雷达维修
1.超声波传感器(雷达)相关术语
(1)超声波传感器
超声波传感器总成(ultrasonic sensorassembly),是用于发射、接收和处理探测障碍物的超声波信号,进行障碍物距离计算的电子装置。
(2)探测范围((field of view)
传感器能够探测到的有效三维空间区域。
(3)探测覆盖率(detect ion coverage rate)
传感器的有效探测范围与所要求的探测范围的百分比。
(4)启动信号(start Ing si gna)
按照既定的通讯协议用于启动传感器工作的指令信号。
(5)收发装置((transce iver dev ice)
用于给传感器发送启动信号或按既定的通讯协议发送数据帧,并接收传感器返回的距离信号、方位信号等信息,以听觉或视觉等方式给予指示的测试专用电子模块。
(6)探侧范围
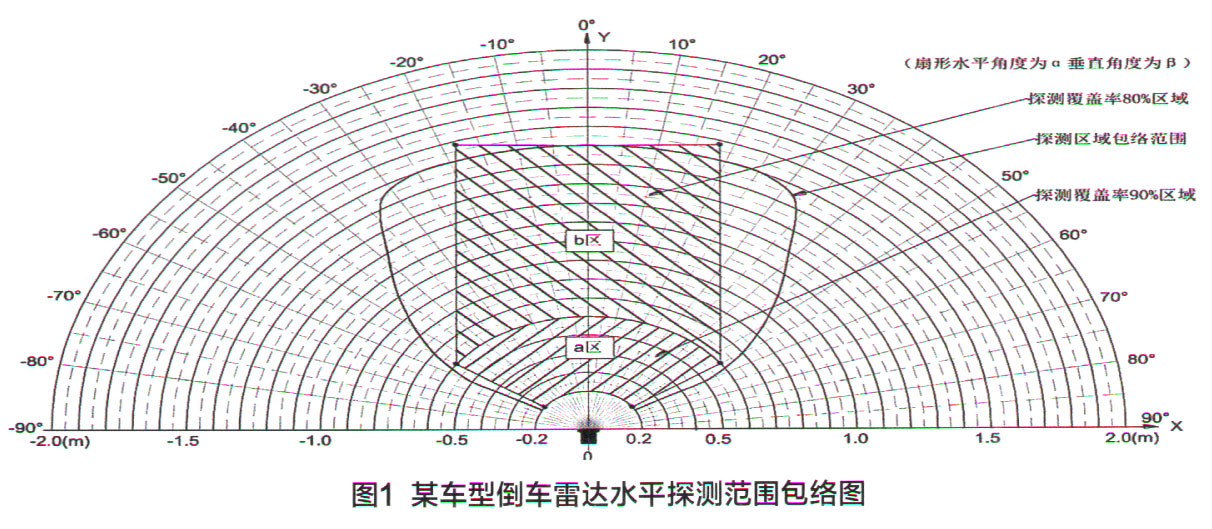
超声波传感器的探测范围应根据应用场景来确定,GB/T《汽车用超声波传感器总成》规定了其探测范围如表1所示。
①水平探测覆盖率
水平探测覆盖率应符合以下规定:
①在极坐标((0.2m、a/2)和((0.2m,-a/2)到极坐标(0.6m、a/2)和(0.6m、-a/2)的范围内,探测覆盖率应不小于90%。
②在坐标点(0.6m、a/2)和(0.6m,-β/2)到(0.6 omx sin a/2、D)和(-0.6 mxsin a/2Dnm)的范围内,探测覆盖率应不小于80%;
③其他范围的探测覆盖率不作要求。
说明:某车型倒车警示(”类)传感器探测距离为:0.2m-1.5m,水平角度为110度,按照a)和b)的坐标点作图,其探测覆盖率90%包络的区域为图1中的a区,覆盖率80%包络的区域为图1中的b区。
②垂直探侧覆盖率
垂直探测覆盖率应符合以下规定:a.在极坐标(0.2m,p/2)和(0.2m,-a /2)到极坐标(0.6m、 a /2)和(0.6m,-a /2)的范围内,有效探测点与范围内要求点的比例需大于90%。
b.在极坐标(0.6m、 a/2)和(0.6m、-P/2)到极坐标(0.6mxSin a/2、 Dmax)和(-0.6m X Sina /2、 Dmax)的范围内,有效探测点与范围内要求点的比例需大于80%.
c.其他范围的探测覆盖率不作要求。
(7)探侧精度
探测精度在0.2m至1.0m范围内应不超过±30m;大于1.0m至最远距离范围内应不超过探测距离的±3%.
(8)启动时间
按照既定的通讯协议能够启动,启动时间应不大于600ms。
说明:通讯协议的格式不限,可由供需双方协商确定。
2.超声波传感器的特点
①直接测量较近目标的距离,一般测量距离/小于10m。
②超声波对色彩、光照度不敏感,可适用于识别透明、半透明及漫反射差的物体。
③超声波对外界光线和电磁场不敏感,在黑暗、电磁干扰强等比较恶劣环境也可探测。
④超声波传感器结构简单、体积小、价格也很低。
⑤超声波传感器可以进行实时控制,信息传输简单可靠,易于小型化与集成化。
3.超声波传感器安装位置
超声波传感器在车上的主要应用就是倒车雷达系统或者前后泊车系统(图2)。
汽车倒车雷达是解决针对行车环境(道路街区、停车场等)存在的视觉盲区,无法看见车后的障碍物的一种汽车防撞系统。这样,系统能够在较低速度进行倒车的过程中,自动识别出车辆后方的障碍物,还能测量车与障碍物之间的距离,在车辆与障碍物发生碰撞之前发出声光报警信号,提醒驾驶员及时停车。
由于车型和车辆配置的不同,汽车前保险杠中安装了不同数量的超声波传感器。很多车型安装了5个超声波传感器甚至更多,目的为了监控优化了几何形状。在后保险杠内安装了碑个超声波传感器。前后保险杠内的超声波传感器在电气和几了可形状方面都是相同的。
上一页 [1] [2] [3] [4] [5] [6] 下一页
关键词:


")
")
")
")

