・上一文章:丰田花冠轿车发动机无法启动
・下一文章:纯电动汽车轮毂电机关键技术综述
摘要:在汽车产业发展过程中,都需要通过试验来验证汽车性能的最优性与安全性。为了保证试验过程中人员的安全性,汽车驾驶机器人代替驾驶员在环境恶劣和危险的条件下进行汽车试验正在成为当今汽车行业的潮流。本文对汽车驾驶机器人技术的发展做出了阐述,为汽车驾驶机器人的发展做出自己的贡献。
0 引言
汽车驾驶机器人作为在汽车试验中可以代替驾驶员进行不同性能要求的工业机器人,其本身具有的高精度、重复性好和操作性强的特点,使其可以代替人类完成一些耗费时间长、效率消耗高的汽车部件与整车性能与寿命试验。汽车在不同工况下的排放试验,特别是具有高精度对比性的试验,可以排除试验过程中的人为因素的影响,从而达到试验结果的高精确性。
1 汽车驾驶机器人性能要求
(1)系统要便于拆装。要保证系统快速的装配与拆卸,安装与调试时间不能过长。
(2)控制系统要便于调试与安装。控制系统的运行应该是自动化的,控制人员只需要在室内进行,不需要对参数进行手动调整。由于汽车试验是要上时间反复进行的,因此控制系统应该对这种情况下对车辆性能的变化有补偿、容错能力。
(3)适用性高。汽车驾驶机器人不仅仅要适用于不同的车型,不仅仅是燃油汽车,同样也适用于新能源车辆与混合动力车辆,也要能够适用于汽车不同的性能测试,包括部件强化试验、噪声试验和燃油经济性试验等。
(4)与驾驶员的驾驶性能具有一致性。其具有真实模拟驾驶员驾驶特性的能力,在动作上要具有人类肌肉特性的特质,在驾驶性能上要具有人的协调性。
(5)学习能力。其应该具有自动学习环境几何尺寸的能力,能够识别离合器、加速/制动踏板与变速器手柄位置等信息。能够自主确定加速踏板位置与发动机性能的关系以及制动踏板与加速度的关系。
2 汽车驾驶机器人的组成
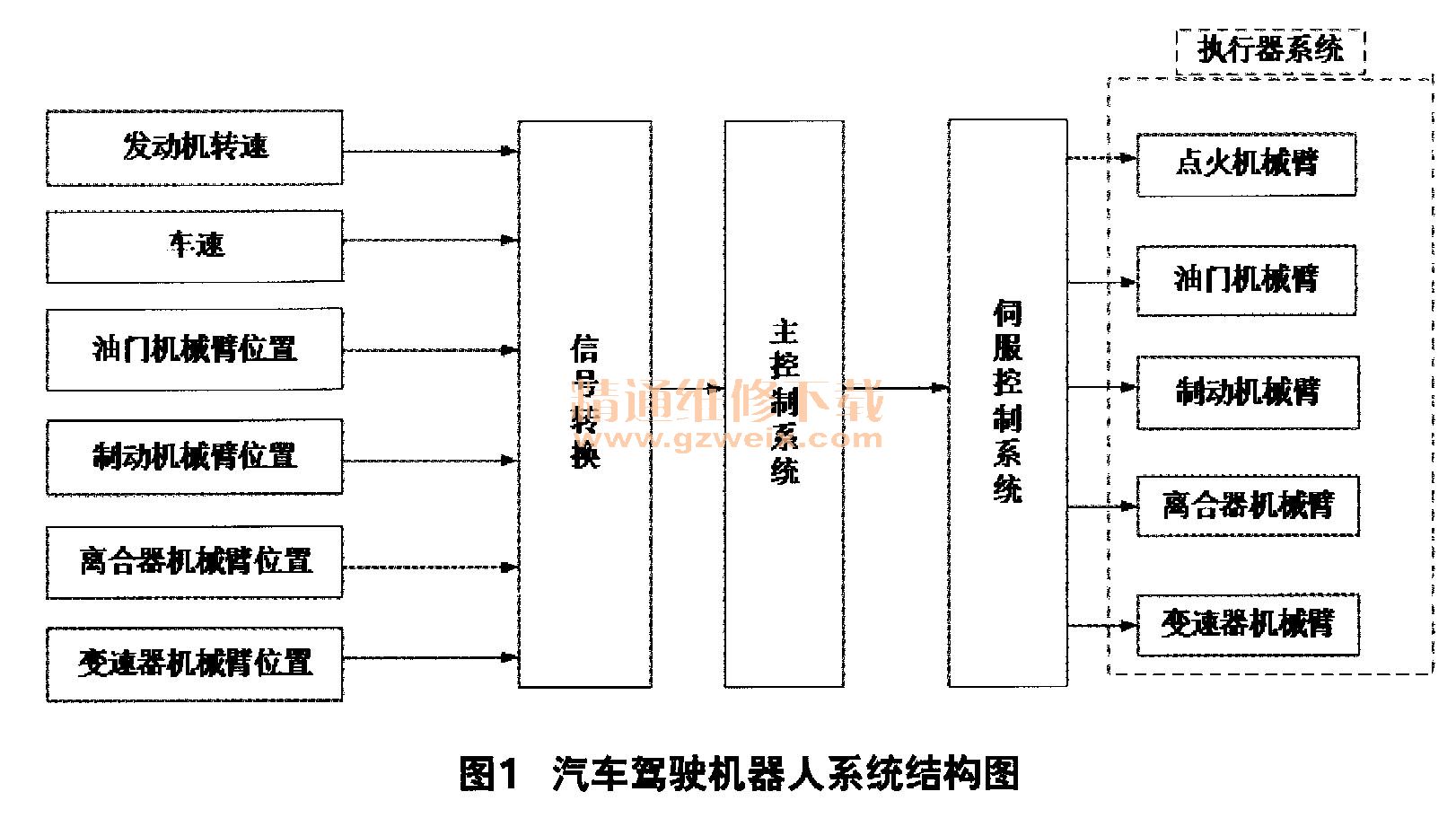
2.1主控制系统
该系统作为驾驶机器人的大脑,其作用是接受汽车在当前时性能参数,包括当前位置与车速,发动机转速,节气门开度等。根据预先设定的阀值与其进行比较计算,实时传输下一时刻的运行控制指令。同时针对汽车发生故障的状况,要能够采取保护性措施,保证自身与车辆的安全,并且可以自主控制汽车的启动与停车。
2.2伺服控制系统
其能够保证机器人操作具有驾驶员的特性,能够满足汽车驾驶时快速换挡保证动力性等特质。
2.3执行器系统
该系统主要是通过不同的机械臂来实时控制与其相关的部件,例如离合器操纵杆能够实时控制离合器踏板,保证离合器能够按照控制指令进行操作。
汽车驾驶机器人系统如下图1所示。
 page_break]
page_break]
3 汽车驾驶机器人关键技术
3.1多体系控制能力
由于汽车运行时具有较强的不确定性,没有可以参考的运行轨迹,在这种情况下驾驶机器人必须要有一定的自主决策能力。多体系控制模型能够确保驾驶机器人可以针对实车试验过程中出现的各种问题,采取不同的控制措施实现汽车的平稳性操作,同时能够兼顾车辆的油耗与排放等其他方面性能。
3.2自主学习能力
车辆及行驶工况的不同情况都对驾驶机器人产生不同的要求,这就需要驾驶机器人要具有一定的自主学习。通过对汽车各个部件包括各种踏板位置与行程,变速器位置以及汽车性能的自主学习,可以使驾驶机器人根据不同的条件作出最优化调整。
3.3补偿能力
由于汽车试验不仅仅需要耗费较长的时间,也需要根据不同的环境进行试验例如针对热带与寒带这种不同的温度、湿度条件下的测试,这些条件下会导致车辆性能的变化,有必要通过采取一定的补偿能力进行在线的优化与补偿,对出现的误差进行拟合,使驾驶机器人能够适应各种环境。
3.4车速控制
车速控制是指实现对预定目标车速的跟踪控制。在汽车行驶过程中采用不同的控制方法来排除外界的不确定扰动与汽车参数的不确定性,以便对车速的进行跟踪控制。越来越普及。在汽车试验中对于驾驶机器人的要求是其能够跟踪预先设定的行驶工况,根据车载传感器传递来的信息,对汽车进行操控包括完成离合器、变速器、加减速性能等的协调配合,实现汽车在驾驶机器人的操纵下的平稳正常行驶,完成整个试验流程并且取得好的成果。





