2.2自动化测试执行
实验室仿真测试的关键在于测试工况的开发,测试工况以ISO国际标准以及控制器的开发要求为基础,覆盖泊车的基本功能、泊车过程中出现故障后控制策略验证以及泊车系统与整车其他控制器之间的交互功能,验证泊车系统是否符合主机厂的规定以及安全性的要求,其中故障注入类的测试及各种极限工况的测试尤为重要,也是仿真测试的重点,下面举例说明仿真测试的执行过程。
2.2.1测试用例1: PAC水平泊入测试
测试工况:水平车位长度6.8 m,本车以速度10 km/h寻车位,车位找到后开始进行泊入和泊出验证。
测试过程:①设置车位和目标车辆位置;②本车以10km/h寻车;③寻到车位后本车开始进行泊入和泊出操作。
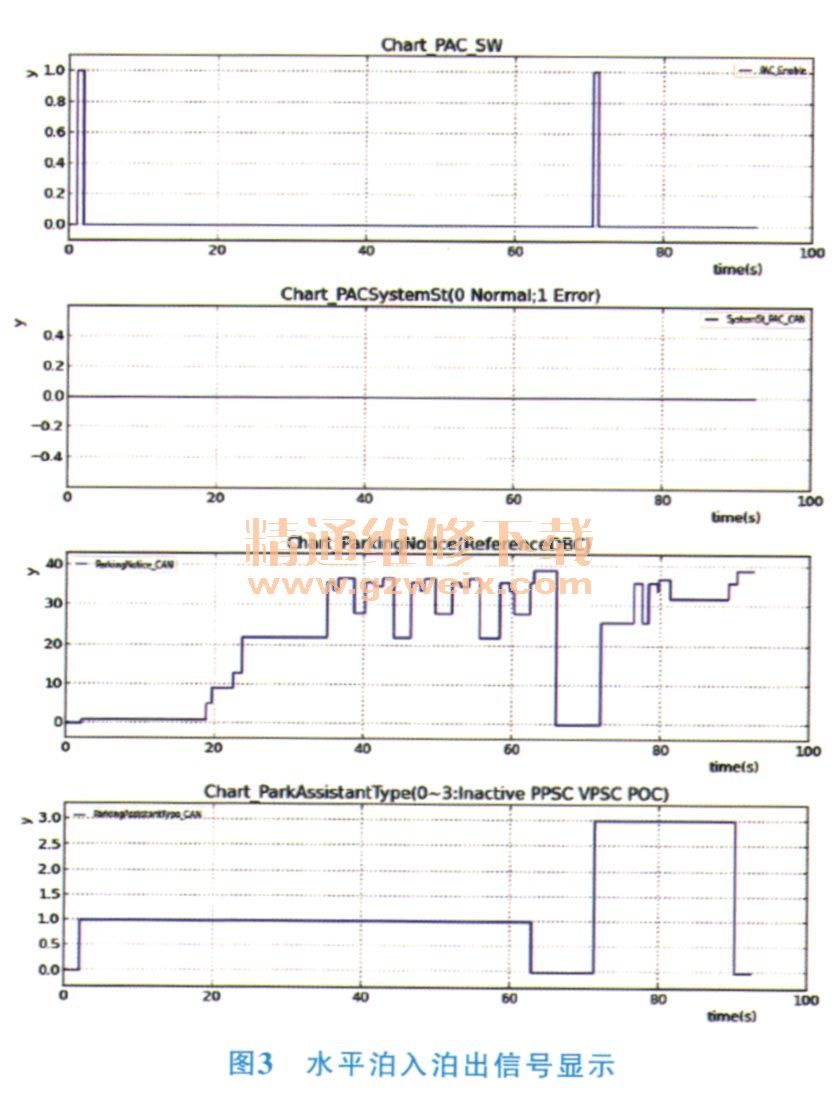
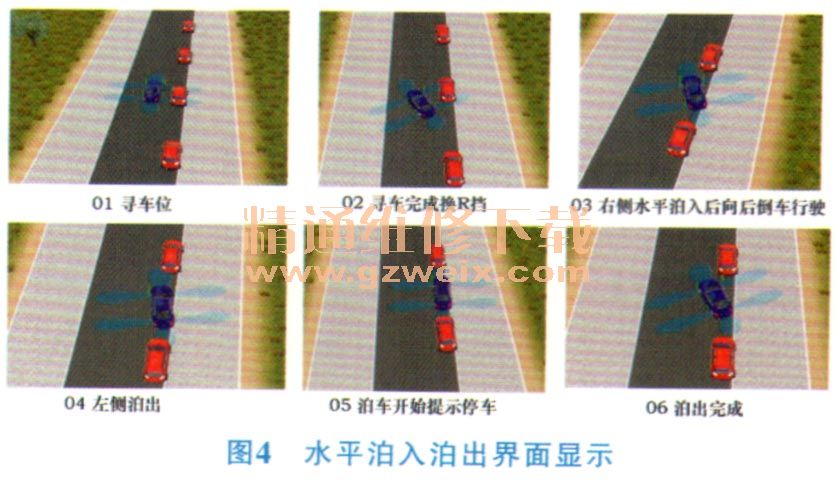
测试结果:车辆可以泊入到指定车位,泊出功能激活后本车可以泊出到指定位置。水平泊入泊出信号显示如图3所示。水平泊入泊出界面显示如图4所示。
2.2.2测试用例2: POC泊出过程中出现方向盘转角信号失效故障
测试工况:水平车位长度6.8 in,本车以速度10 km/h寻车位,车位找到后开始进行泊入操作,提示等待转向过程中出现方向盘转角信号失效。
测试过程:①设置车位和目标车辆位置;②本车以10km/h寻车;③寻到车位后本车开始进行泊入和泊出操作;④泊出过程在提示“等待转向”过程中出现转向盘转角信号失效/超时故障。
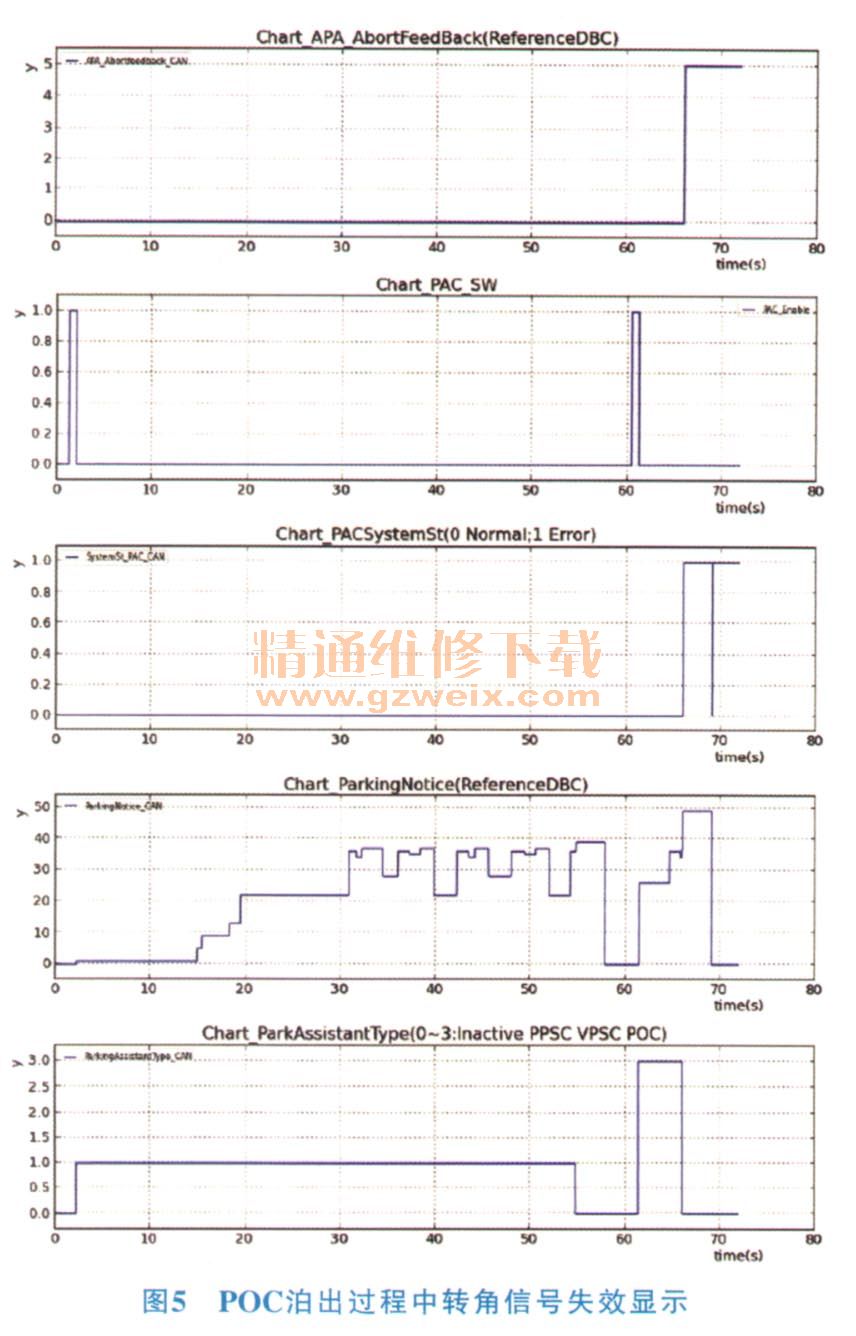
测试结果:泊车退出,并给出提示信息。POC泊出过程中转角信号失效显示如图5所示,泊车退出显示如图6所示。

通过实际测试验证,本试验仿真系统在泊车过程中的故障注入测试及雨雪天气等故障状态或极限工况的仿真测试非常方便,测试工况相对于实车测试具有可重复性和复现性,对于控制器泊车算法的测试验证比较充分,对进入实车测试的安全性提供有利保障。
3 结论
本文详细阐述了半自动泊车系统的工作原理,并介绍了实验室仿真测试系统的搭建原理及测试方法,实验室仿真测试能够快速发现整车电气在开发过程中出现的故障现象和极限工况,针对自动泊车复杂的控制策略和泊车算法,体现了明显的测试效果和优势,在实车测试前进行充分的验证,有效降低实车测试的风险,保证了整车的泊车功能和性能。
上一页 [1] [2]





