・上一文章:2014年奥迪A8L发动机故障指示灯(MIL)亮起
・下一文章:基于CANape-Matlab联合仿真的旁通技术研究与实现
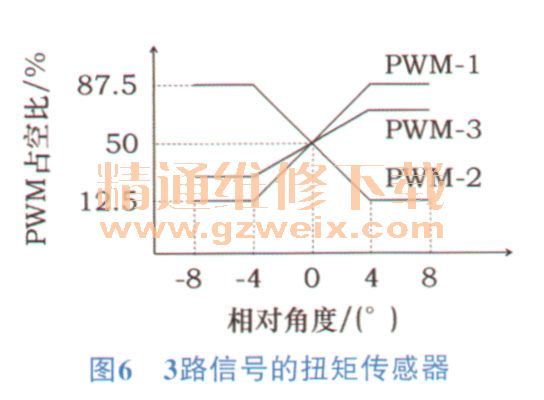
2.2扭矩传感器设计
在满足L3等级的冗余EPS中,至少需要3路扭矩信号(图6),有4路信号更好,以确保在其中一路信号发生故障时可以被精确监控并识别。传统的L2等级的EPS中,多使用2路扭矩信号的扭矩传感器(图7),这类传感器只能通过相互校验确定信号是否有问题,当其中一路信号发生故障时,系统能关闭助力,将EPS由电动助力模式切换到纯机械模式。
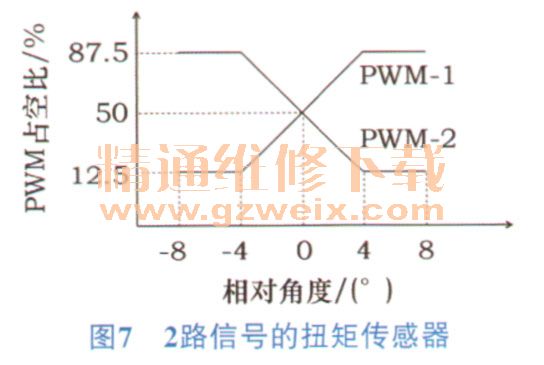
为提升扭矩信号的可靠性,推荐在L3及以上等级的EPS中采用独立的双2路信号的扭矩传感器。
2.3控制器及电气系统设计
对于永磁同步电机驱动的EPS,安全等级L2及以下等级的E PS控制器电路原理框图如图8所示。
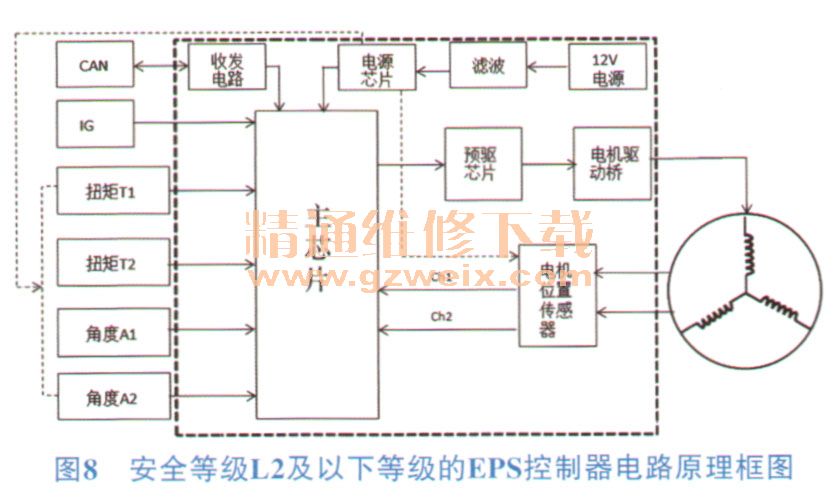
传统L2以下的控制器,当任何一个元器件发生问题,基于安全考虑,EPS都会采取降低助力输出或关闭助力的措施,如电机位置传感器发生问题,采取的是关闭助力策略。这种策略在L3的安全等级要求下,需要进行相应的修改。
根据SAE L3的安全等级要求,在车辆检测到系统发生故障后,会立即通知驾驶员接管车辆。从发生问题到驾驶员接管,期间需要耗费一定的时间,且越长越好。在车辆处于自动驾驶状态下,需要转换为驾驶员接管,一方面车辆需要有足够的措施让驾驶员从“沉睡”中惊醒,同时需要时间让驾驶员恢复到清醒状态,确保车辆安全;另一方面,在这段时间里,系统仍有足够的能力,确保车辆处于安全状态。
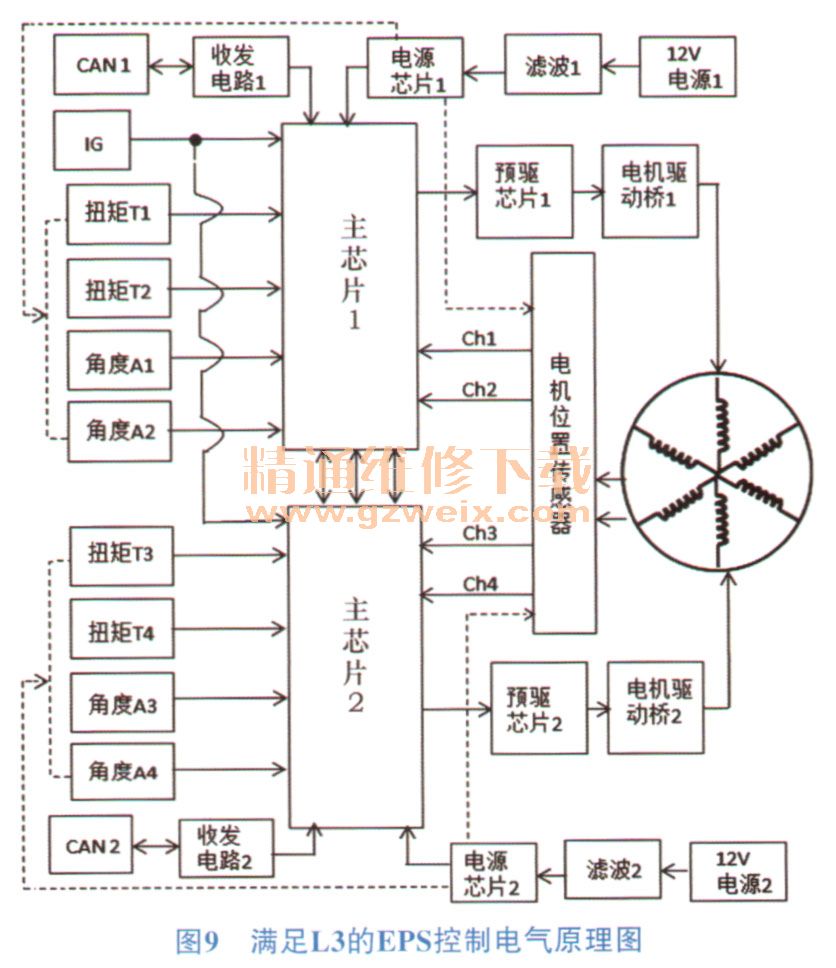
为了满足安全要求,对控制器也进行冗余设计,简单来说,是将控制系统进行双份设计,即主芯片、电源芯片、预驱电路、CAN收发器、电机驱动桥等均用两套零件,满足L3的EPS控制电气原理图如图9所示。其中,主芯片1和主芯片2需要运行不同的算法,且运算后的扭矩指令需要进行比较,同时需要进行时钟的同步性校验,以及电机位置解算、扭矩和转角信号解算后的校核,这样才能确保在单点失效或有限多点同时失效后,系统仍然能提供一定的助力需求,确保系统有足够的时间,唤醒驾驶员接管车辆。
3 结束语
车辆自动驾驶是未来的发展方向,作为执行机构的转向系统,必须确保系统足够的安全,在发生单点失效或有限多点失效时,系统能控制车辆正常行驶,并有足够的时间提醒驾驶员接管车辆。本文提出的“冗余”设计概念,不仅适用于EPS,同时也可被车辆上其余需要满足L3安全等级的电气部件借鉴;再将电机拓展为9相或12相,同时拓展预驱芯片和电源芯片,能满足更高的L4或L5的等级要求,以迎接全自动驾驶时代的到来。
")
")
")
")
")
