・上一文章:2014年奥迪A8L发动机故障指示灯(MIL)亮起
・下一文章:基于CANape-Matlab联合仿真的旁通技术研究与实现
摘要:作为执行机构的电动助力转向系统,需要进行冗余设计,才能满足整车高等级的自动驾驶需要。本文从功能安全等级类着手,提出满足1、3等级的EPS电机、扭矩传感器、控制器等电控系统硬件的冗余概念设计,为满足自动驾驶需求的转向系统设计提供了借鉴。
电动转向系统(Electrical Power Steering System、EPS)经过这些年的发展,已取得了长足进步。EPS不仅能在不同车速下给车辆提供最佳的转向助力,而且在辅助驾驶方面,作为执行机构,提供了越来越多的功能,如自动泊车、驾驶模式切换、车道保持、侧风补偿、转向力矩补偿等。
近几年,自动驾驶得到了越来越多的车企重视,如特斯拉在2016年前就宣称能实现高速公路的Auto Pilot,但安全问题频发。即将于2018上市的全新Audi A8,宣称能实现美国汽车工程师协会(SAE)规定的L3级别自动驾驶技术,车辆可在小于60 km/h复杂道路下自动驾驶。遇到紧急情况时,车辆会发出接管请求,给驾驶员提供8~10s的时间评估路况,然后重新控制车辆。对于自动驾驶技术,国内的车企也是不遗余力地进行研发,力求在新一轮的竞争中立于不败之地。目前普遍认为,要实现高速公路上最高车速大于120 km/h的自动驾驶,预计要到2020年左右。
1 智能辅助驾驶等级分类
根据美国汽车工程师协会(SAE)划分的标准,智能辅助驾驶分为5个等级,从低到高分别为L1~L5。划分的依据是其失效率fit (Failure-instance/time)的大小。定义1000套转向系统运行1了小时出现1次突然失去助力失效为1fit。一般情况下,L2的fit值要大于100、L3的fit值为10,L4/L5的fit值为1)关于等级定义、驾驶员和系统的责任划分,详见表1。
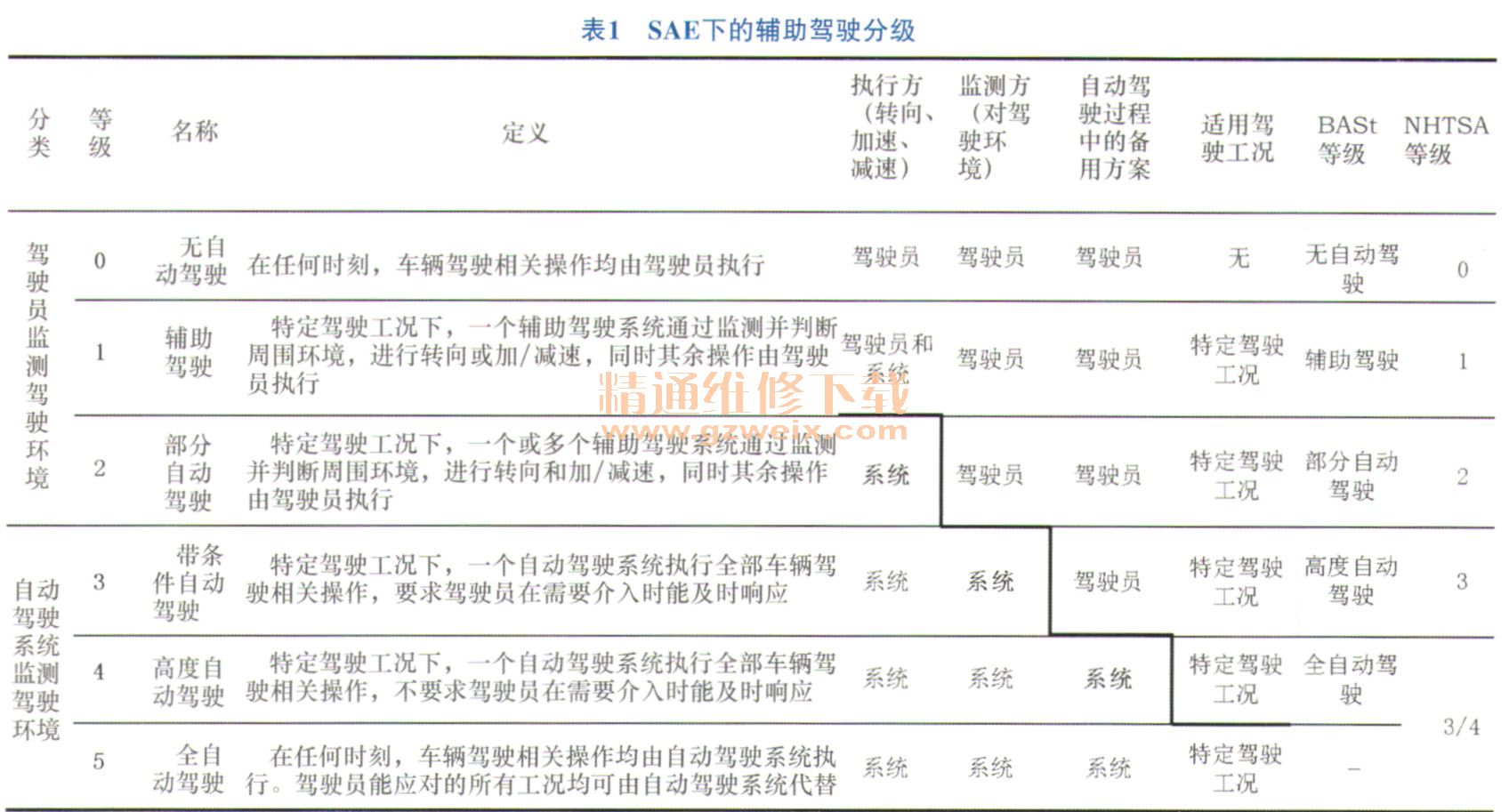
要实现高速公路上的自动驾驶,系统至少需要满足L3驶的安全等级,失效率达到10 fit,和飞机的失效率相当:当整车和系统达到了L4或L5的安全等级后,车辆就完全实现了在全路段、全天候下的自动驾驶。
2 满足L3自动驾驶下的EPS
图1是转向系统的框图。对于机械(如小齿轮、齿条等)而言,只要其强度和疲劳满足系统要求,自然不会导致“突然失去助力”情况的发生。对于电机、传感器和控制单元来说,则存在电机绕组失效、传感器和控制器电子元器件失效。在L2安全等级下,这些失效都会导致EPS终止提供助力,由电动助力状态转入到纯机械状态,以保障车辆和乘员的安全。

满足L3安全等级的车辆,可以在高速公路上自动驾假设车辆时速为120 km/h,每秒钟车辆行驶的距离为33.33 m,如果在转向过程中EPS某个部件发生了故障而不能得到及时有效处理,很明显会发生严重的安全事故。如何确保L3安全等级的EPS在发生单点或有限多点失效时仍是安全的,是当下需要解决的问题。
最简单的做法是在EPS上装两套系统,当一套系统失效后,立即切换到另一套系统。虽然这样可以解决一些问题,但同时存在一些缺陷:①成本太高,基本上就是双倍价格;②占用较大空间,在整车布置上存在困难;③两套系统间助力切换所需时间。从安全角度上讲,当一套系统的某个模块或部件发生故障后,要立即把信息传递到该控制器的微处理器(MCU),MCU确认故障属实后,再向另一套系统(即备用系统)发出启动邀请,备用系统启动进行助力控制。整个切换过程需要在10 ms内完成比较安全,因为对应于120 km/h的车速,10 ms行驶的距离为0.333 m,相对来说属于安全范围,而这么多的工作,10 ms内完成,有较大的难度。
为了达到1.3的安全等级,同时避免上述的缺陷,本文提出了“冗余”设计的概念,可满足自动驾驶的需要。下文对EPS的每个电气部件进行展开说明。
2.1电机设计
在冗余电机中,采用6相或12相电机,这样就是双三相电机或4个三相电机。以6相电机为例,当某一相电机绕组出现故障时,可以关闭对应的3相电机助力,剩下的3相电机仍然能提供50%的助力。测试表明:车辆在静止状态下,最大助力的50%可以覆盖约10%的转向盘转角范围(图2);在车辆速度超过15 km/h后,最大助力的50%可以覆盖约85%的转向盘转角范围(图3),且该比率随着车辆速度的提升而提高。


满足L3的EPS电机设计,采用双三相电机即可满足要求,原因如下。
1)当车速大于15 km/h时,50%助力可以满足85%的齿条行程助力要求。85%的齿条行程,对应转向盘从中间位置向一个方向的转动角度为4590(假设转向盘从中间位置到极限位置转角为5400),能覆盖L3规定的“特定驾驶工况下”的转角范围。当其中3相突发故障需要关闭时,50%的助力可满足系统要求,系统仍然控制车辆,同时提醒驾驶员接管车辆。
2)当车速低于15 km/h时,可以借助制动系统和转向系统的共同工作,系统对车辆进行控制,同时提醒驾驶员接管车辆。
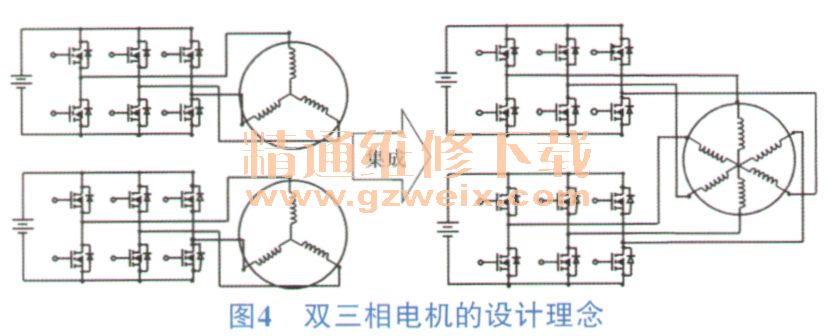
6相电机的设计理念见图4,将6相绕组分为双三相绕组,两套对称的三相绕组(图5)空间相差30°,ABC之间相位差120°,UVW之间相位差同为1200,A和U之间相位差30°。

")
")
")
")
")
