・上一文章:广汽三菱欧蓝德发动机电脑更换
・下一文章:浅析汽车底盘装甲及其材料的选择
3.电动驱动单元(EDU)操作
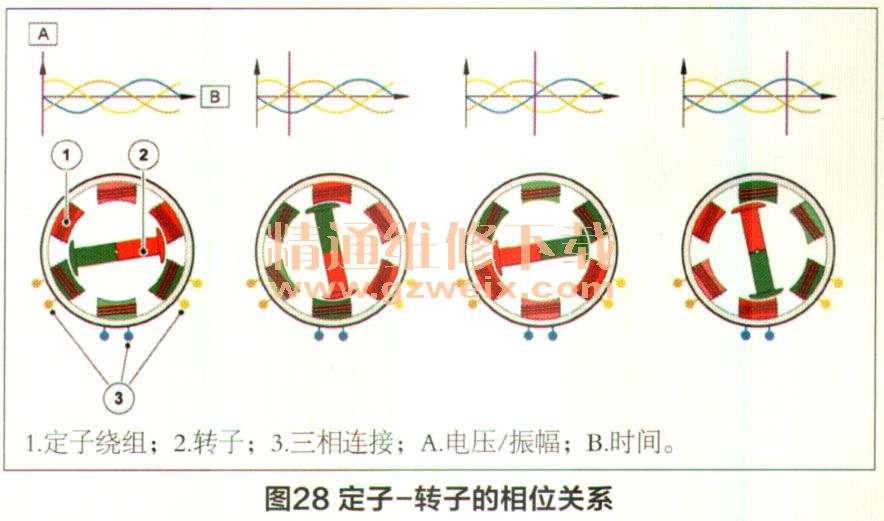
每个电动驱动单元(EDU)操作的操作都由其所附的逆变器根据来自动力传动系统控制模块(PCM)的扭矩请求指令进行控制。逆变器根据需要在电机和发电机两个角色之间切换EDU的操作。当EDU作为电机工作时,逆变器接收来自HV蓄电池的直流(DC)电源,然后将其转换为3相交流电(AC)。高压AC被施加到电机中的三相定子绕组。来自旋转分解器环位置传感器的数据用于控制HV三相AC的相位。根据来自PCM的扭矩请求指令,逆变器确定施加到EDU上的HV三相AC的相位(如同步电机操作部分中所述)。逆变器和PCM通过FIexRay总线网络进行通信。
当处于再生制动模式时,EDU产生三相AC以供应至逆变器(如同步电机操作部分中所述)。逆变器会将AC整流为DC并调节电压,以便向高压蓄电池充电。逆变器控制在再生制动期间回收的电能以及对前后轮施加的制动效果。PCM通过FIexRay总线网络将来自每个EDU的所需制动力数据发送至逆变器。
4.EDU变速器部件
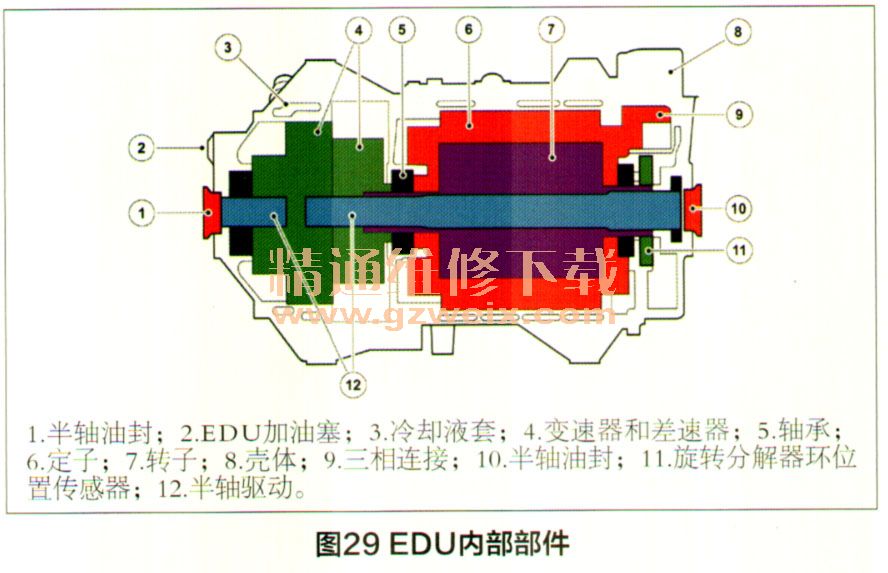
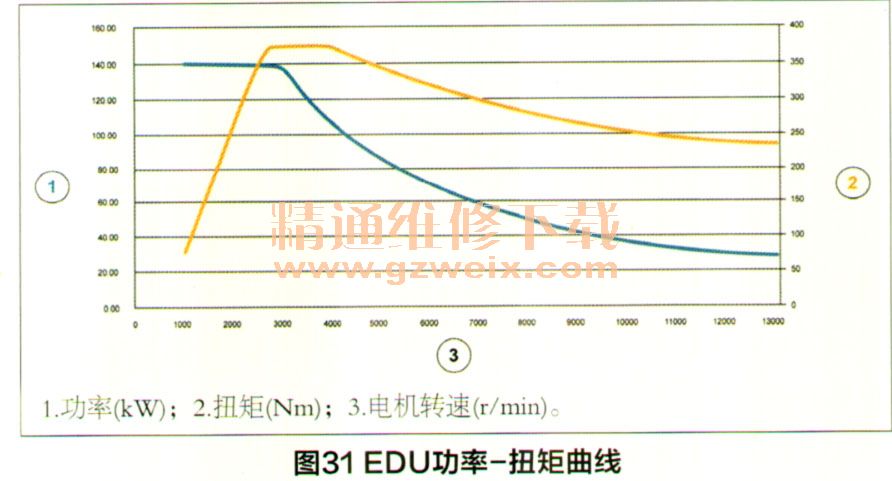
EDU内部部件如图29所示,变速器如图30所示,EDU功率一扭矩曲线如图31所示。每个EDU都含有一个带开放式差速器的单速行星齿轮变速器。该变速器降低了电机输出转速,同时增加了向从动轮输出的扭矩量。前后EDU之间的扭矩分配由PCM进行控制,并且基于车辆动态性能和稳定性,以便防止出现过度转向、转向不足、车轮打滑等。当从静止状态加速时,电机输出可在两秒钟内升高至160kW,同时后轴将会输出更多的扭矩,以便充分利用车辆后部的较高抓地性。但是,可能会存在来自底盘输入的干预。例如,当在低摩擦路面上从静止状态起步时,车辆会将扭矩偏置从后轴调节至前部,以便获得最高的抓地性。当车辆以低于80km/h的速度巡航时,后轴将会获得优先级来帮助降低座舱内的噪声级。当车辆以较高的速度巡航时,每个EDU之间的扭矩分配几乎都始终保持在50%。在急加速期间,为了使用每个单元的全部可用功率/扭矩,扭矩分配也为50%。两个EDU之间的扭矩偏置将会持续得到调整,以便针对驾驶条件提供最高的抓地性。

注意:I-PACE具有一个驾驶爬行模式,驾驶员能够从触摸屏菜单中选择该模式。在选择后,该模式将允许车辆在驾驶员松开制动踏板时轻微地向前移动,就像传统的自动变速器一样。只有在变速器处于驻车档时才能打开或关闭该模式。
")
")
")
")
")
