・上一文章:夏天发动机冷却系统也需要使用防冻液吗?
・下一文章:小型制冷设备管道焊接技术(下)
摘要:封闭差动行星齿轮传动机构是一种新型组合传动机构。这种传动机构除了具有行星齿轮传动的所有优点,还具有功率分流,承载能力大等优点。主要对此传动机构中的高速级太阳轮轴进行设计与分析。首先确定封闭差动行星齿轮的各组成部分,根据已知参数设计轴的结构,然后利用有限元分析软件Simulation对轴进行有限元分析,从而达到优化设计的目的。
0前言
封闭差动行星齿轮传动机构是一种新型的将一个简单行星齿轮传动和一个差动行星齿轮传动进行封闭式连接的组合传动机构。这种传动机构除了具有行星齿轮传动的所有优点,还具有功率分流,承载能力大等优点。本文对此传动机构中的太阳轮轴进行了结构的设计与有限元分析,在利用Solidworks进行三维建模的基础上,通过Simulation对其进行静态分析,通过静态分析,掌握传动轴在当前载荷情况下的受力和变形情况,确定其强度、硬度是否符合要求。
1 封闭差动行星齿轮传动机构
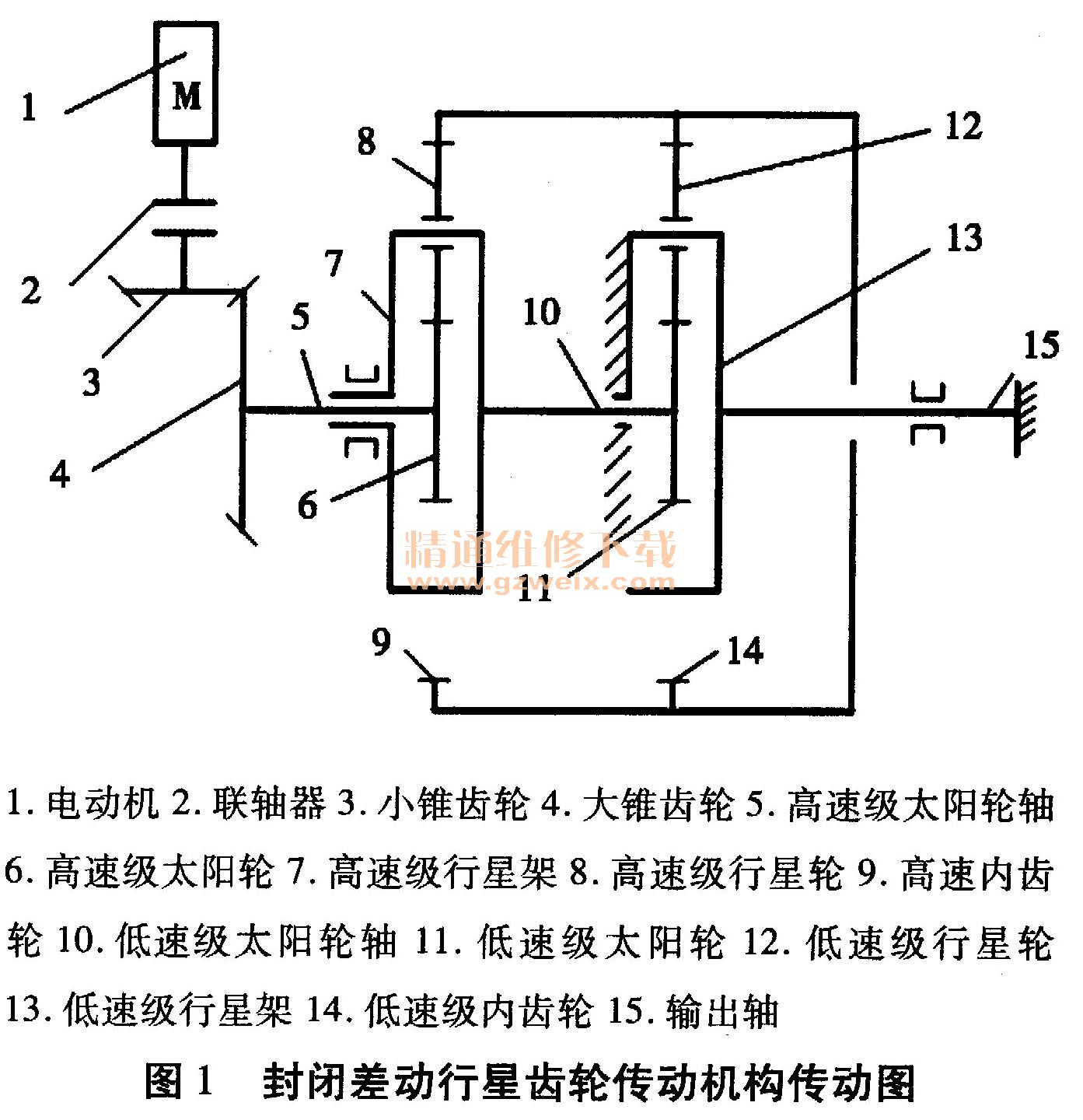
本设计是基于一个新型内置式传动滚筒内部的封闭差动行星齿轮传动机构,对其中的高速级太阳轮轴进行设计和分析。具体传动图见图1。
2 轴的结构设计
2.1已知参数
转速n = 490 r/min,输出功率P=28 kW ,输出扭矩T=561.5N·m
2.2确定最小直径

式中A0----最小直径系数,取115;
P----轴功率(kW);
n----轴转速(r/min )。
考虑该轴左端与联轴器相连,右端一个键槽与齿轮相连,故将轴径增大10%~15%,取整后可得d=60 mm。
2.3轴的结构设计
(1)考虑到使用要求,将轴设计成阶梯轴,根据传动图可知,左前第一段轴段要通过联轴器与其他轴相连,故设计半键槽,第二段为轴承的安装位置,第三段为轴肩,起到轴承的轴向定位作用,第四段安装高速级太阳轮。
(2)齿轮以轴肩、弹性挡圈实现轴向定位,以平键连接及选用过渡配合H7/n6实现周向固定。轴承以轴肩和套筒实现轴向定位,采用过盈配合k6实现周向固定。
(3)轴的零件图见图2。

3 轴的静态分析
3.1网格划分
(1)材料选择。考虑选择45号钢。弹性模量为210 GPa,泊松比为y=0.30,屈服强度355 MPa。
(2)网格划分。在Solidworks中建立高速级太阳轮轴的三维模型,利用Simulation分析模块进行网格划分,单元格尺寸为8. 318 mm,划分得到的网格单元数为12 287个,自由节点数为18 712个,见图3。






