・上一文章:基于8051F单片机的数字音频信号源的幅度控制设计
・下一文章:基于RTX51实时操作系统的交通灯控制系统的设计
4 SPI软件设计
在硬件连线正确的基础上,要进行SPI通信,还要对M25P16编写驱动程序,包括SPI初始化、读M25P16的数据、向M25P16写人数据、数据的擦除等,这里使用C语言编程,编译器选择PICC,开发环境为MPLAB IDE8.10。
PIC16F877A的SPI通信涉及4个寄存器:控制寄存器SSPCON、状态寄存器SSPSTAT串行接收/发送缓冲器SSPBUF和移位寄存器SSPSR。其中,SSPCON的8位都是可读可写的,用于设置SSP处于主/从模式、时钟频率、时钟极性、SSP使能以及写冲突检测;SSPSTAT只有高2位可读写,低6位是只读的。PIC16F877A处于接收模式时,SSPSR和SSPBUF构成2级缓冲的接收器,SSPSR每收到1个完整的字节,就将该字节传给SSPBUF,并将中断标志位SSPIF置1,可通过读SSPBUF得到数据;877A处于发送模式时,写SSPBUF操作会同时将数据写入SSPSR,触发传输。下面结合具体的代码进行详细阐述。
(1)SPI初始化与读写函数
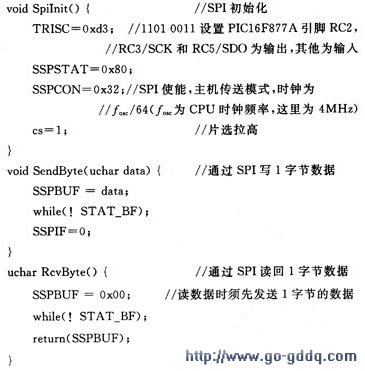
从SendByte和RcvByte函数的代码中,可以看出数据发送和接收是否完成,都是通过判断STAT_BF标志位(SSPSTAT寄存器的BF位,STAT_BF是在头文件pic1687x.h中定义的名称)来实现的,而数据手册中关于BF位的描述仅用于接收模式。这是由于PIC16F877A通过SDO发送数据的同时,会通过SDI读人数据,当1字节发送完成时,刚好接收1字节到SSPBUF,这时SSPBUF满,BY被置为1,故可通过STAT_BF标志判断1字节是否发送完成。
(2)连续写函数
M25P16的PP指令允许1次连续写入不超过1页(256字节)的数据。写人数据之前,首先要发出写允许命令,然后才能执行数据写入操作。数据写入函数参数包括address(32位地址)、bLOCk(写入数据缓冲区指针)、n(一次连续写入的字节数,n<256)。如果address的低8位不全为0,即不是从页起始处写,并且需要写入的数据超出该页剩余空间,则超出部分被丢弃。代码如下:
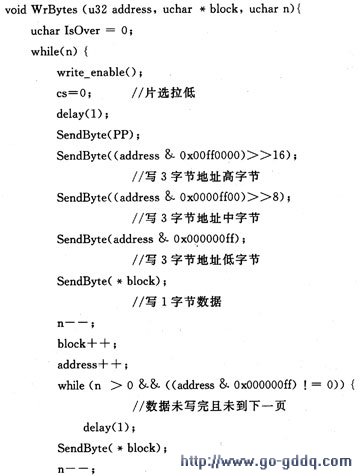
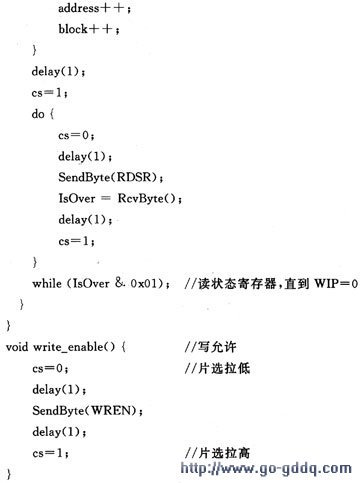
其中,delay()为延时子函数,参数为ms级,delay(1)即延时1ms。加入延时,是为了保证存储器在准备好的情况下才进行读写操作。
(3)连续读函数
M25P16允许发出读指令后,连续读取数据,这一模式极大提高了总线效率。数据读取函数的参数包括address:32位地址;block:读数据缓冲区指针;n:一次连续读取的字节数,代码如下:
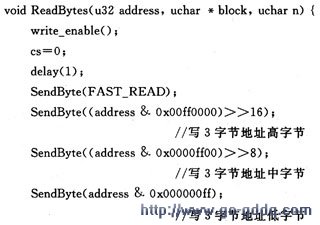

M25P16的连续读操作与连续写不同的是,无论READ还是FAST_READ,在起始地址处1字节的数据读出后,会自动寻址更高地址处的数据,故程序中无需address++语句。
除了对M25P16的初始化、读写之外,经常还要对其进行擦除操作,擦除有扇区擦除和整体擦除2种方式,执行数据擦除将使内部所有数据变为FFH。擦除操作与写操作类似,在此不再赘述。
结 语
本文介绍的M25P16与PIC16F877A的接口已应用于自来水流量数据采集的本地存储中。运行稳定可靠,未发现数据丢失现象,对其他应用有一定的参考价值。


")
")

")