・上一文章:温度传感器工作原理及其应用
・下一文章:无线传感器网络节点的研究与实现
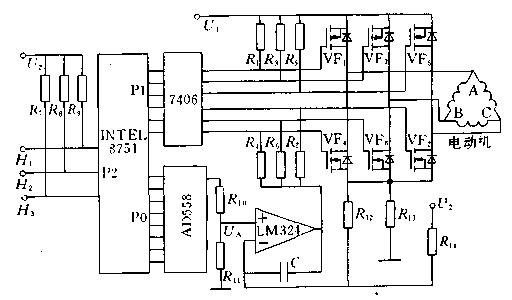
图12 直流无刷电动机计算机控制原理图
换相的控制
根据定子绕组的换相方式,首先找出三个转子磁钢位置传感器信号H1、H2、H3的状态,与6只功率管之间的关系,以表格形式放在单片机的EEPROM中。8751根据来自H1、H2、H3的状态,可以找到相对应的导通的功率管,并通过P1口送出,即可实现直流无刷电动机的换相。
起动电流的限制
主回路中串入电阻R13,因此Uf=R13*IM,其大小正比于电动机的电流IM。而Uf和数模转换器的输出电压U0分别送到LM324运算放大器的两个输入端,一但反馈电压大于Uf大于来自数模转换的给定信号U0,则LM324输出低电平,使主回路中3只功率管VF4、VF6、VF2不能导通,从而截断直流无刷电动机定子绕组的所有电流通路,迫使电动机电流下降,一旦电流下降到使Uf小于U0,则LM324输出回到高电平。主回路又具备导通能力,起到了限制电流的作用。
转速的控制
在直流无刷电动机正常运行的过程中,只要通过控制数模转换器的输出电压U0,就可控制直流无刷电动机的电流,进而控制电动机的电流。即8751单片机通过传感器信号的周期,计算出电动机的转速,并把它同给定转速比较,如高于给定转速,则减小P2口的输出数值,降低电动机电流,达到降低其转速的目的。反之,则增大P2口的输出数值,进而增大电动机的转速。
PWM控制的实现
转速控制也可以通过PWM方式来实现。图13和图14为PWM控制实现直流无刷电动机转速的控制。
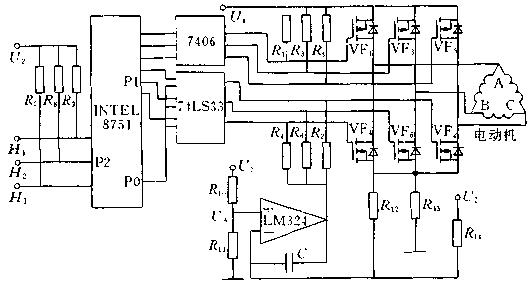
图13 PWM控制原理图
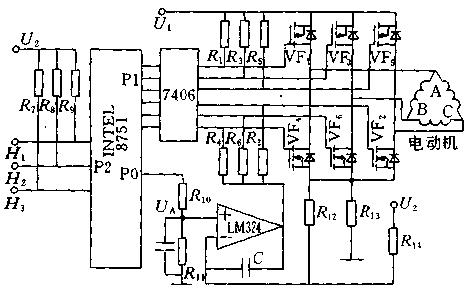
图14 PWM控制原理图
直流无刷电动机的正转反转,通过改变换相次序来改变其转动方向。具体做法只需要更换一下换相控制表。
变结构控制的实现
当直流无刷电动机处于起动状态或在调整过程中,采用直流无刷电动机的运行模式,以实现动态相应的快速性,一旦电动机的转速到了给定值附近,马上把它转入同步电动机运行模式,以保证其稳速精度。这时计算机只需要按一定频率控制电动机的换相,与此同时,计算机在通过位置传感器的信号周期,来测量其转速大小,并判断它是否跌出同步。一旦失布,则马上转到直流无刷电动机运行,并重新将其拉入同步。
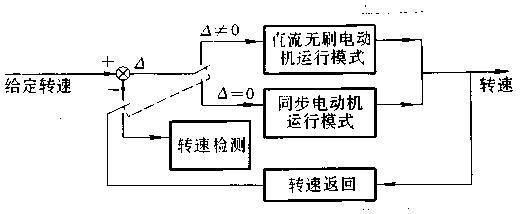
图15 直流无刷电动机的变结构控制




")
")