・上一文章:剖析宝马X6(E72) 混合动力新技术 ( 八 )
・下一文章:检修大众POLO警告灯闪亮,转向无助力故障
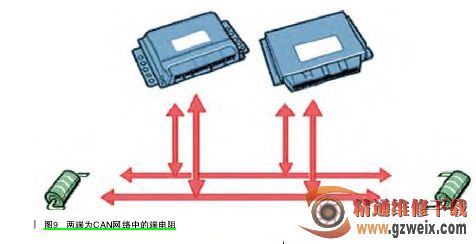
数据总线终端电阻:
CAN-BUS数据总线两端通过终端电阻连接(如图9所示),终端电阻可以防止数据在到达线路终端后像回声一样返回,并因此而防止干扰原始数据使传输信息失真。保证了数据的正确传送,终端电阻装在控制单元内。
驱 动 系 统 中 C A N - H i g h 线和CAN-Low线之间的总电阻为50~70Ω。如15号线断开,可以用电阻表测量双绞线之间的电阻。舒适系统和信息系统CAN总线的特点:控制单元的负载电阻不是在CAN-High线和CAN-Low线之间,而是在导线与地线之间;电源电压断开时,CAN-Low线(舒适/信息系统)上的电阻也断开,因此不能用电阻表进行测量。大众车型中设置有两种终端电阻,包括66Ω(发动机控制单元)和2.6kΩ(自动变速器控制单元和ABS控制单元)。
总线数据传输:
CAN总线数据传输大部分车型用的是两条双向数据线,分为高位(CAN-H)和低位(CAN-L)数据线。为了防止外界电磁波干扰和向外辐射,两条数据线缠绕在一起,要求至少每2.5cm就要扭绞一次,两条线上的电位是相反的,电压的和总等于常值。
为了提高数据传递的可靠性,CAN数据总线系统的两条导线分别用于不同的数据传递。
在显性状态和隐性状态之间进行转换时CAN导线上的电压变化(例CAN驱动总线):在静止状态时,这两条导线上作用有相同预先设定值,该值称为静电平。对于CAN驱动数据总线来说,这个值大约为2.5V。
静电平也称隐性状态,因为连接的所有控制单元均可修改它。在显性状态时,CAN-High线上的电压值会升高一个预定值(对CAN驱动数据总线来说,这个值至少为1V),而CAN-Low线上的电压值会降低一个同样值,于是在CAN驱动数据总线上,CAN-High线就处于激活状态,其电压不低于3.5V,而CAN-Low线上的电压值最多可降至1.5V,如图10所示。

")
")
")
")

