・上一文章:细说国产轿车自动变速器维修技术(83)
・下一文章:详解长安奔奔防盗系统匹配
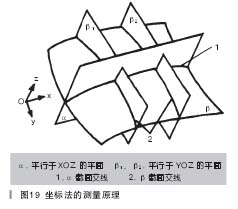
(3)坐标法
①坐标法的测量原理坐标法最适用于对轿车车身壳体表面的测量。坐标法的测量原理是利用车身构件的对称性原则,用测量设备采集被测点在 x、y、z 三个方向的数据。同时,如图 19 所示,通过用一组平行于 xoz 平面的平行平面 α,截取被测件平面 β,交线即为所在面的曲线。同理,也可用平行于 yoz 平面的一组平行面 β1、β2来测量等距x 间隔的各截面曲线。将两组测得的曲线组合,即可获得该构件曲面形坐标参数,圆滑连接,即可形成该构件表面形线的实样测绘图。对测量结果进行对比、分析,车身构件的外观形态就大体勾画出来。
②三维坐标设备的结构与测量方法
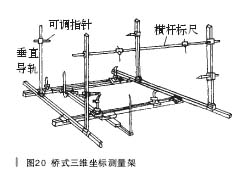
桥式三维坐标测量架的结构如图20 所示,由导轨、移动式测量柱、测量杆和测量针等组成。测量过程中,可根据需要调整其车身的相对位置。当测量针接触到车身表面时,就能直接从导轨、立柱、测杆及测量针上读出所对应的测量值。
专用激光测量台的结构如图 21所示。它能对车身各部尺寸进行较为精确的测量。测量时光源发出的激光束,经多次透射和反射后,最终可将光点射在各塑料标尺上,指示值即为相应的车身尺寸。测量台上的尺寸测量架还可检测出车身整体方面存在的变形。这种专用激光量台可以和拉拔矫正装置配套,真正实现车身修理过程中对修复尺寸的监控。

三坐标测量机是机械、航空、汽车、电子等工业首选的几何量检测设备。它可以显示汽车各部分的实际照片 ;操作中能够迅速地精确定位到测量点 ;配备了蓝牙无线通信技术的无线测量探头,无须使用恼人的电缆,也无须在地板上费工费时地连接线缆 ;可以在任何时候测量任何部件,同时可监视拉伸牵引过程 ;可以很容易地移动,甚至在汽车被放置在矫正平台上之前就能够进行损坏诊断。三坐标测量机的类型较多,这对不熟悉的用户会感到无所适从。
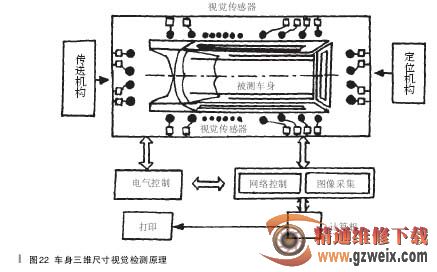
三坐标测量机由主机、探头、电子电器三部分组成。大型三坐标测量机视觉检测原理如图 22 所示。该系统包括多个视觉传感器、全局校准、现场控制、测量软件等几部分。每个视觉传感器是一个测量单元,对应车身上的一个被测点,系统组建时,所有的传感器均已统一到基准坐标系下(即系统全局校准),传感器由系统中的计算机控制。测量时,每个传感器测量相应点的三维坐标,并转换到基准坐标系中,全部传感器给出车身上的所有被测点的测量结果,完成系统测量任务。
")
")
")
")

