・上一文章:大众速腾轿车无灯光冷监控报警
・下一文章:奥迪A8组合仪表上前照灯水平调节警告灯点亮
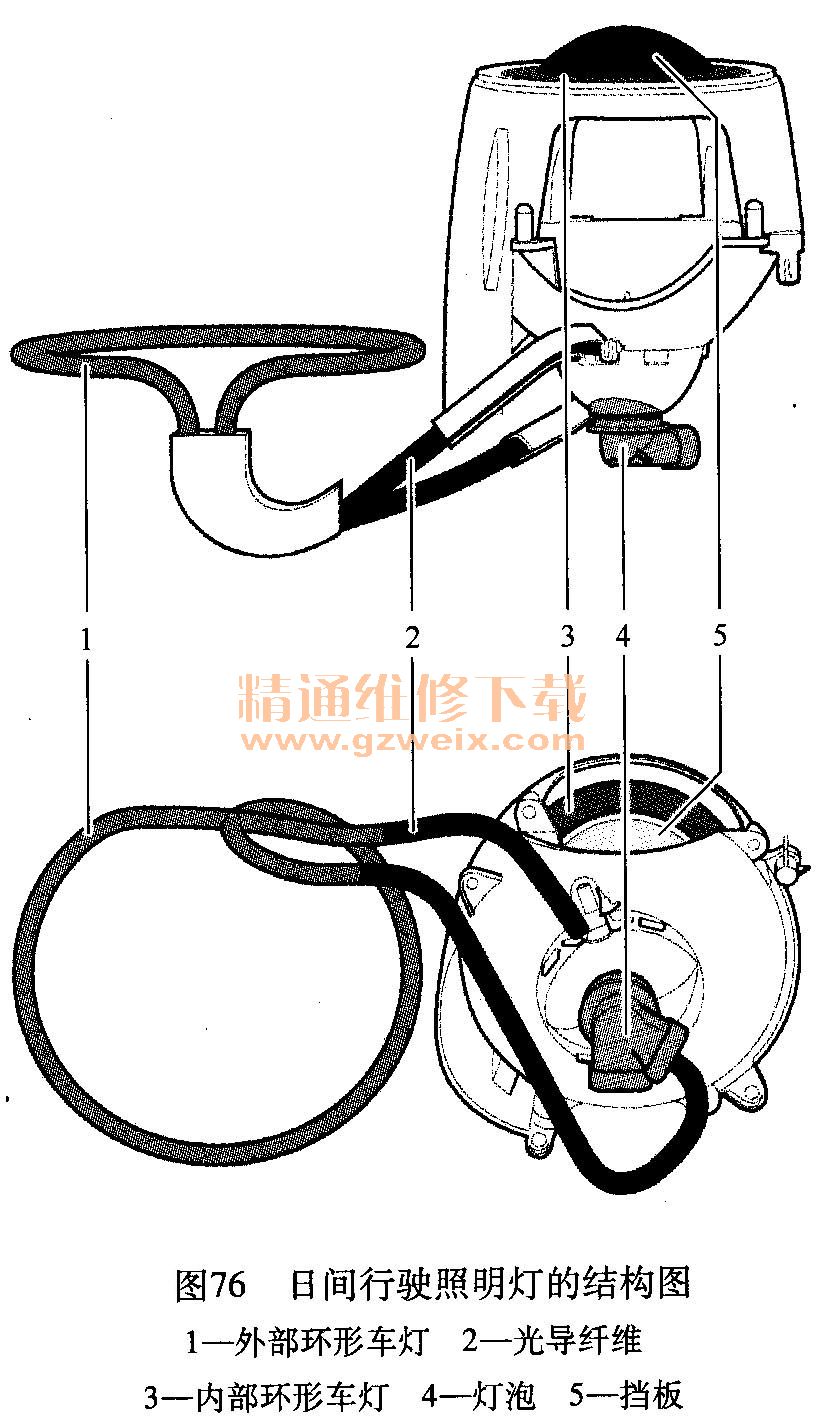
(1)日间行驶照明灯 双氙气前照灯总成内侧灯室有一个用于执行日间行驶照明灯功能的35W白炽灯泡。日间行驶照明灯以及相应的停车示警灯功能通过内部和外部环形车灯实现。如图76所示,内部环形车灯采用后部照射方式,反射器可确保主要将光线照射到环形车灯上。在环形车灯中部有一个深色挡板,用于挡住反射器向前照射的光线。外部环形车灯的工作原理与光导纤维相同。由相同的灯室向两个光导纤维输送光线并提供给外部环形车灯。处于日间行驶照明灯模式时,内部环形车灯比外部环形车灯更亮。接通停车示警灯或近光灯时,脚部空间模块就会减弱日间行驶照明灯功能,从而使日间行驶照明灯的两个环形车灯都作为停车示警灯使用。
启用日间行驶照明灯时,车灯开关必须处于位置“0”处。如安装有行车灯自动控制装置,即使近光灯处于关闭状态,也可以接通日间行驶照明灯。此时车灯开关必须位于位置“A”处。驾驶人可通过个性化配置停用/启用日间行驶照明灯。在车灯开关位置1(停车示警灯)时同样可以启用日间行驶照明灯。
(2)迎宾照明灯 启用迎宾照明灯时,车灯开关不得位于位置“0”或“1”处,停车示警灯也不得处于启用状态。
车辆开锁时就会接通迎宾照明灯。为此便捷登车及起动系统通过K-CAN2提供中控锁状态信号。脚部空间模块接收“车辆开锁”状态信息并接通车外照明装置大约20s。
该系统同时控制以下照明装置:尾灯、环形车灯、侧面示廓灯(选装)、车内照明装置、进出车门照明装置、组合仪表内的指示灯。
(3)伴我回家 伴我回家功能是标准配置,车灯关闭后可通过远光灯组合开关启用该功能。出厂时接通时间设置为40s,可通过“个性化配置”在0~240s之间调节。启用了回家照明时,近光灯、停车示警灯和尾灯会随之亮起。
(4)动态前灯照明距离调节装置 动态前灯照明距离调节装置是针对双氨气前照灯的一项法规要求。动态前灯照明距离调节装置可确保不会造成对面来车眩目。前部和后部各安装了一个车辆高度传感器用于前灯照明距离调节装置。前部和后部车辆高度传感器分别安装在车辆前桥和后桥上。
车辆高度传感器的信号用于动态前灯照明距离调节装置。集成式底盘管理系统直接分析车辆高度传感器信号。脚部空间模块通过K-CAN2得到集成式底盘管理系统的信号。信号必须在中央网关模块内从FlexRay转移到K-CAN上。
(5)灯泡监控 宝马新7系(MUM)智能照明与信号装置的所有灯泡都由脚部空间模块进行监控,无论灯泡是否处于接通状态。
关闭车灯时执行冷监控,冷监控的方法是对各灯泡输出进行电流测量。此时所用的电流脉冲很短,不会使车灯亮起。脚部空间模块对各灯泡输出进行分析,从而识别出导线是否断路或灯泡是否损坏。总线端15接通后的前4s内,电流脉冲的数量会大大增加,以便在车辆起动前识别出灯泡功能是否正常。这项功能也称为行驶前检查。进行行驶前检查后,脉冲数量就会下降。随后每隔1. 5min为灯泡供电一次。装备发光二极管的车灯不包括在冷监控范围内,这是因为发光二极管对电流脉冲反应过快,会随之亮起。冷监控功能也不包括双氙气前照灯,因相关法规禁止向双氙气前照灯输送电流脉冲。
打开车灯时执行热监控,其方法是对各灯泡输出进行电流测量,从而可以通过灯泡电流识别出过载或断路情况。前部和后部转向信号灯也包括在灯泡监控范围内。
(6)视觉报警/视觉反馈信息 便捷登车及起动系统发出用于中控锁功能的信号。脚部空间模块也会通过K-CAN2得到这些信号并将其用于中控锁的视觉反馈信息。
脚部空间模块可使防盗报警装置通过转向信号灯触发视觉报警。
带有集成式超声波车内监控装置的车顶功能中心通过K-CAN2提供用于视觉报警的信号。此外,脚部空间模块也从车顶功能中心得到用于防盗报警装置视觉反馈信息的信号。
碰撞和安全模块发送一个碰撞信号时,脚部空间模块就会接通危险报警灯和车内照明装置。危险报警灯可以用危险报警灯开关关闭。将车灯开关置于位置0关闭车灯或操作组合开关上的翘板开关即可关闭危险报警灯开关的照明装置。
(7)“总线端15关闭”时的特殊情况 如果行驶期间“总线端15接通”失灵或因无意中按压START-STOP按钮而停用了总线端15,车外照明装置就会关闭。为了在这种情况下确保道路交通安全,处于接通状态的行车灯保持接通状态。车速降至20km/h以下时,近光灯延迟约30s后关闭。
(8)应急运行功能 如果因脚部空间模块的软件故障而导致整个照明与信号装置失灵,就会切换到应急运行模式。此时会接通行车灯(近光灯和每侧一个尾灯)和制动信号灯(附加制动信号灯和每侧一个尾灯)。
(9)自适应随动前灯 自适应随动前灯包括以下功能:自适应随动前灯;转弯照明灯;可变车灯光线分配;自适应前灯照明距离调节装置。
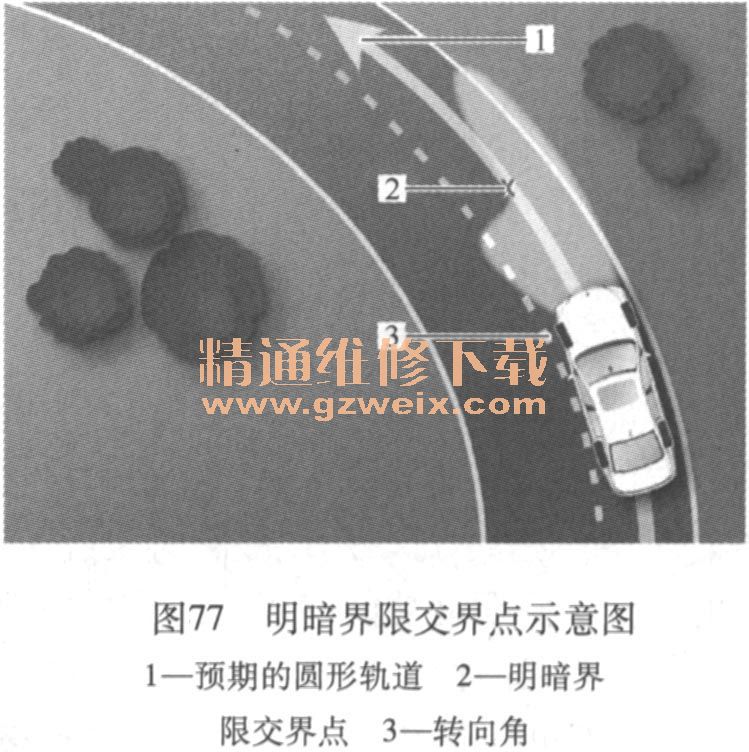
1)自适应随动前灯。自适应随动前灯允许在限定范围内摆动,主要目的是避免前灯造成对面来车眩目。驾驶人转动转向盘时,车辆沿圆形轨道移动,车轮移动和前车轮角度决定了圆形轨道的走向。如图77所示,为避免对面来车眩目,在100倍于前灯安装高度的距离内,前灯明暗界限的交界点不得位于圆形轨道左侧。
为确保自适应随动前灯正常工作,必须使其与车辆专用数据相匹配。车辆专用数据位于脚部空间模块内和前灯驱动模块内。脚部空间模块内包括车辆识别号和车型数据。前灯驱动模块内包括以下数据:前灯和前灯摆动范围、允许的加速度和减速度、车速特性曲线、安装设码、车辆识别号、车型。
自适应随动前灯的功能主要由脚部空间模块负责,因此自适应随动前灯的全部软件都位于脚部空间模块内。脚部空间模块通过LIN总线连接,以便与前灯驱动模块通信。脚部空间模块请求得到前灯当前状态信息。远光前灯摆动时,脚部空间模块通过LIN总线将所需请求信息发送给前灯驱动模块。脚部空间模块还通过K-CAN2连接在车载网络上,脚部空间模块通过K-CAN2得到对执行自适应随动前灯功能来说重要的信号。表1给出了提供输入信号的控制单元。

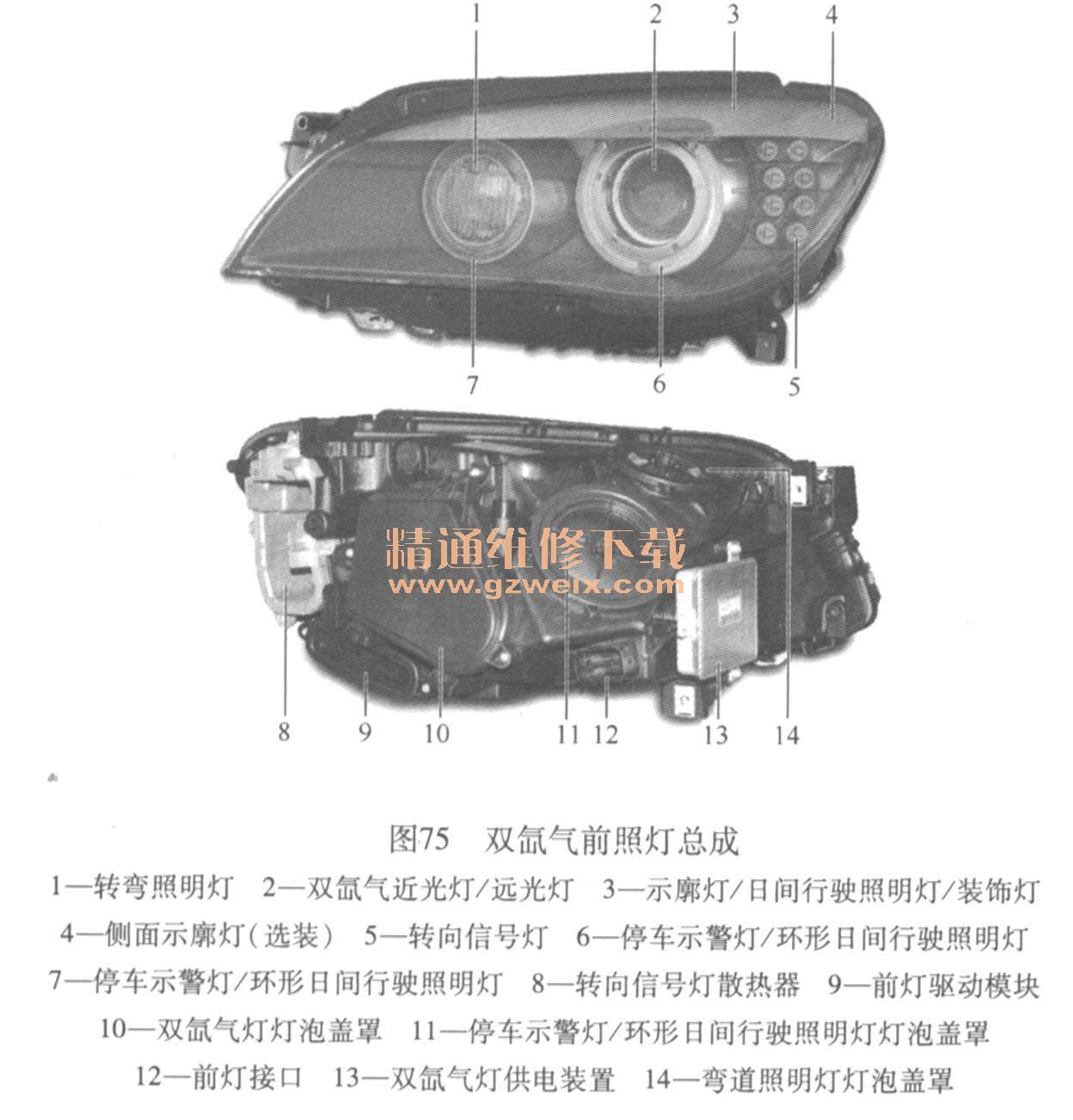
①系统组成。自适应随动前灯包括下列组件:双氙气灯控制单元、双氙气前灯的摆动模块、前灯照明距离调节装置的步进电动机、环形停车示警灯/环形日间行驶照明灯、转向信号灯、装饰灯、侧面示廓灯(选装);前灯驱动模块。
双氙气灯控制单元位于双氖气前灯总成上,它为双氙气前灯灯泡供电及提供起动电压。双氙气前灯的摆动模块包括双氙气前灯灯泡、零位霍尔传感器和步进电动机等组件。双氙气前灯灯泡集成在自适应随动前灯的可摆动部分内。零位霍尔传感器记录摆动模块的零位位置。步进电动机负责摆动模块摆动。采用独立式步进电动机控制前灯照明距离调节装置。前灯驱动模块控制和监控自适应随动前灯步进电动机和动态前灯照明距离调节装置步进电动机的移动。
②接通条件。从总线端15接通开始即可启用自适应随动前灯。晴雨/光照/水雾传感器识别到光线阴暗时就会发送接通近光灯的请求信息。脚部空间模块首先接通前灯驱动模块。双氙气前灯进行参考运行后,自适应随动前灯进入准备状态。每次重新起动时都要进行参考运行。
接通自适应随动前灯的条件是:
a. “总线端15接通”。
b.车灯开关位于行车灯自动控制位置。
c.晴雨/光照/水雾传感器识别到光线阴暗。
d.两个双氙气前照灯都完好无损。
脚部空间模块通过测量相应双氙气前照灯的耗电量判断其是否损坏。晴雨/光照/水传感器发出近光灯接通信号时,就会同时接通自适应随动前灯。
③功能指示灯。出现故障时,近光灯和前灯照明距离调节装置仍保持启用状态。双氙气前灯模块的摆动功能停用,组合仪表内出现一条检查控制信息。
④运行原理。自适应随动前灯根据摆动模块的当前位置进行参考运行,以确定零位。为了避免校正期间出现滞后现象,摆动模块始终从同一侧经过零位传感器。只要关闭自适应随动前灯前始终使摆动模块移动到零位传感器同一侧的静止位置处,即可实现上述要求。如图78所示,摆动模块从关闭位置方向摆动到光轴方向时,通过脉冲下降沿可识别出摆动模块相对零位传感器的零位。系统根据这个“软”参考点在运行期间反复校准摆动模块(向摆动模块的正摆动方向驱动步进电动机相当于向右摆动)。
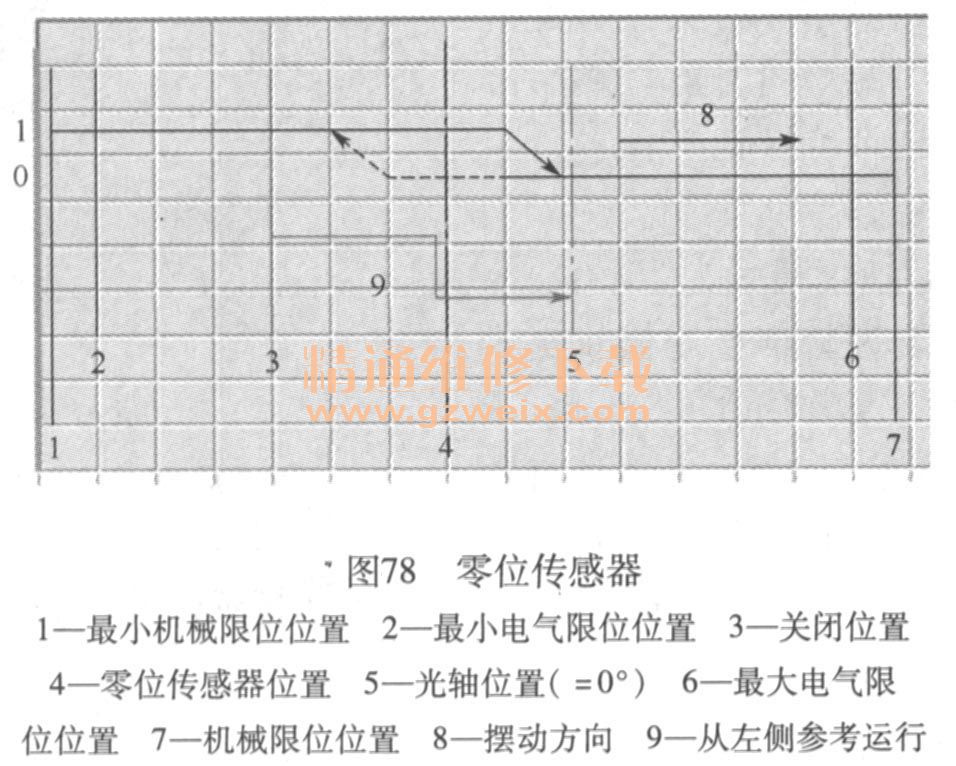
1和7是摆动模块的机械限位位置,机械限位位置由前灯结构决定。摆动模块的位置未知时需要一个差角数据,为此必须进行到达机械限位位置的参考运行,这种运行称为“硬”参考运行。
摆动模块指向车辆直线行驶方向时的摆动位置称为光轴,该位置的角度为0°。光轴的准确定义是指与零位传感器之间的角度以及与机械限位位置之间的角度。因此通常可通过零位传感器确定摆动过程中的光轴。出现故障时可利用与机械参考点之间的差角。
通常情况下摆动模块不移动到机械限位位置,而是直至最小和最大电气限位位置处。使摆动模块移动到电气限位位置可防止到达机械限位位置时脉冲丢失。最小和最大电气限位位置的定义是指与零位之间的角度。摆动范围是指自适应随动前灯可以利用的最大摆动角度。
脚部空间模块通过LIN总线授权前灯驱动模块控制相应的步进电动机。前灯驱动模块控制步进电动机使前灯摆动。执行可变车灯光线分配功能时,前灯驱动模块控制步进电动机使前灯升起或降低。转弯行驶时不得超过随动前灯的最大摆动范围。对可变车灯光线分配功能来说,也必须考虑到这一点。根据车灯光线分配情况,左侧前灯需同时向外和向下摆动某一角度。左转弯行驶时必须用自适应随动前灯的摆动角度减去向外摆动的角度。以直线行驶时移动前灯为例,表2给出了调节相应车灯光线分配时需移动哪个前灯。
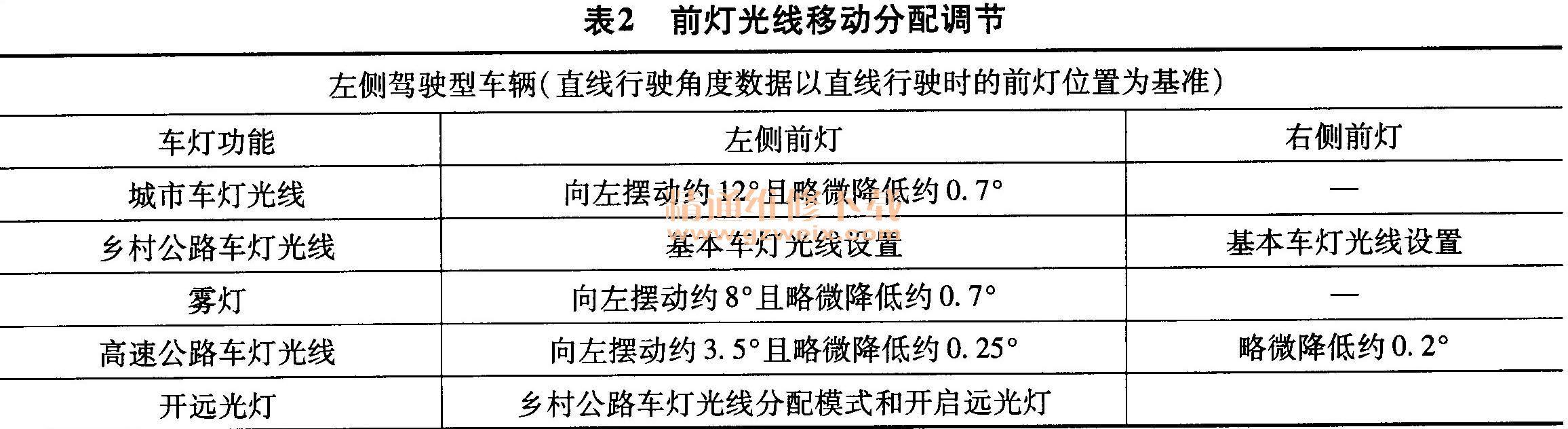
左转弯示例:启用城市车灯光线分配时左侧前灯向左摆动约12°,同时前灯略微降低。因为向左转弯行驶时最多可摆动15°,所以仅比随动前灯摆动角度多3°.
右转弯示例:启用城市车灯光线分配时左侧前灯向左摆动约12°,同时前灯略微降低。向右转弯行驶时最多可摆动8°。前灯只能摆动8°。
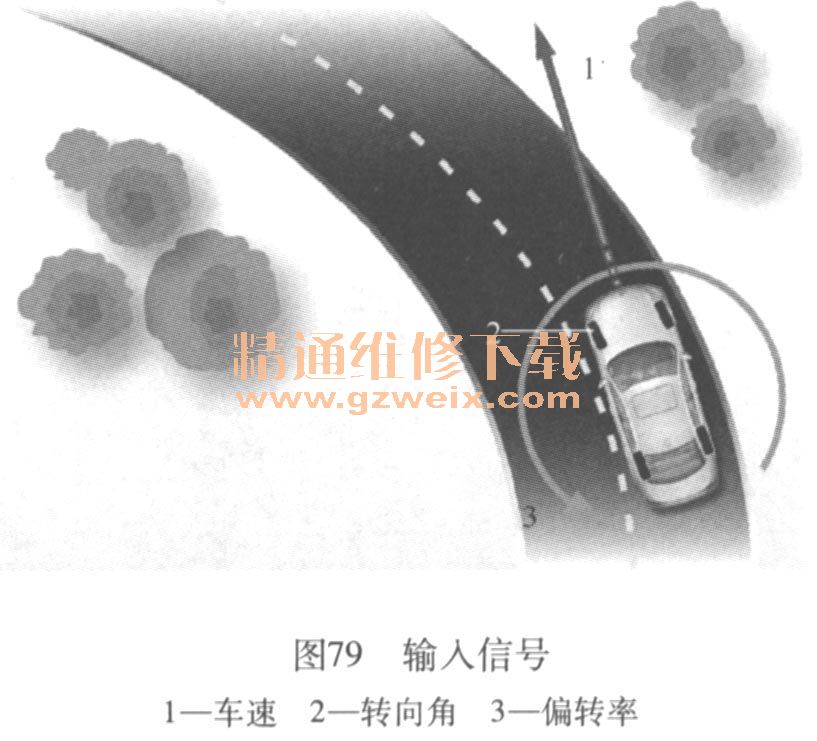
摆动模块的回转角速度最大为30°/s。为使摆动模块摆动,需要为脚部空间模块提供转向角、车速和偏转率等信号(图79)。正常行驶情况下,车速不超过40km/h时通过转向角传感器发送的数据控制自适应随动前灯。
满足以下条件时,系统会在计算过程中考虑偏转率传感器的数据:
a.车速超过40km/h。
b.车辆过度转向或不足转向。
c.车辆开始偏转。
车轮转速传感器提供车速信号,为此动态稳定控制系统分析相应车轮的车辆转速传感器信息。系统通过转向角传感器和偏转率传感器识别车辆是否过度转向或不足转向或发生偏转,此时停用自适应随动前灯,摆动模块返回到其零位位置。偏转率传感器提供车辆绕垂直轴线偏转的信号,它安装在驾驶人与前乘客座椅之间的传动轴通道上。转向角传感器安装在转向柱开关中心内,它是一个光学传感器,提供转向盘转向角的相关数据。
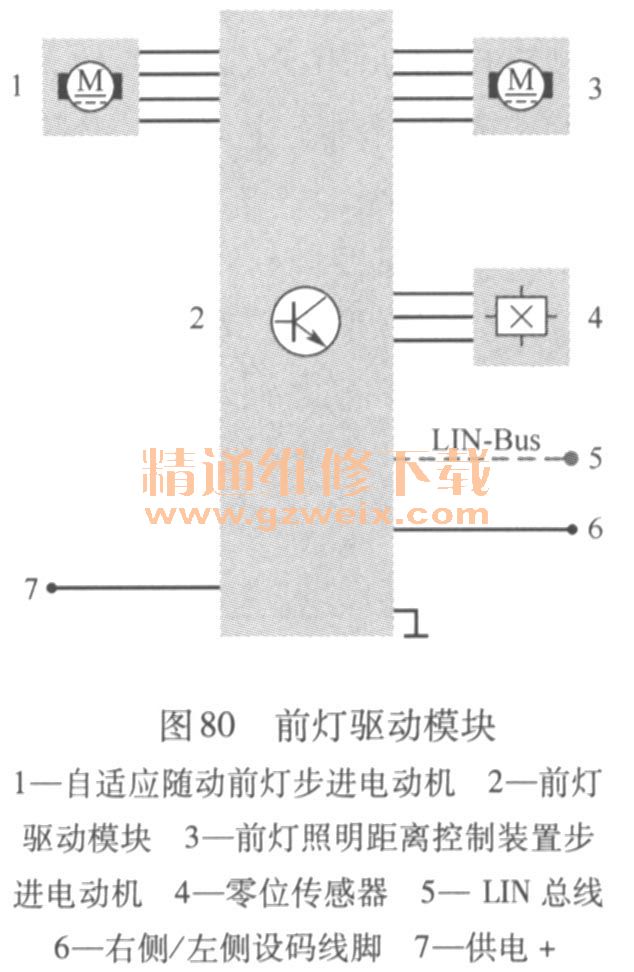
如图80所示,前灯驱动模块控制和监控用于自适、应随动前灯和相应双氙气前灯照明距离控制装置的步进电动机。集成式底盘管理系统为脚部空间模块提供动态前灯照明距离调节数据。脚部空间模块通过K-CAN2接收这些数据。因此可根据不同行驶状况(例如装载/空载)调整照明距离。集成式底盘管理系统的信号必须在中央网关模块内转化为K-CAN2信号。
前灯驱动模块完成以下功能:
a.接收并分析由脚部空间模块通过LIN总线发送的数据:参考运行、目标位置指令和诊断请求。
b.步进电动机功率控制。
c.摆动模块零位确定。
d.摆动模块参考运行。
e.向脚部空间模块反馈摆动模块的位置。
f.诊断。
g.向脚部空间模块反馈诊断数据。
作为自适应随动前灯的中央控制单元,脚部空间模块每隔20ms查询一次前灯驱动模块的状态。此外脚部空间模块还要求系统启用前灯内的发光二极管。
摆动模块的零位由零位传感器测量,它是一个霍尔传感器,系统通过分析霍尔传感器的下降沿确定零位。零位是指车辆处于直线行驶方向时摆动模块的所在位置。前灯驱动模块提供通过LIN总线进行数据传输的相关数据。脚部空间模块要求前灯驱动模块提供相关数据。诊断期间可读取传感器信号。如果没有任何传感器信号则说明传感器损坏。
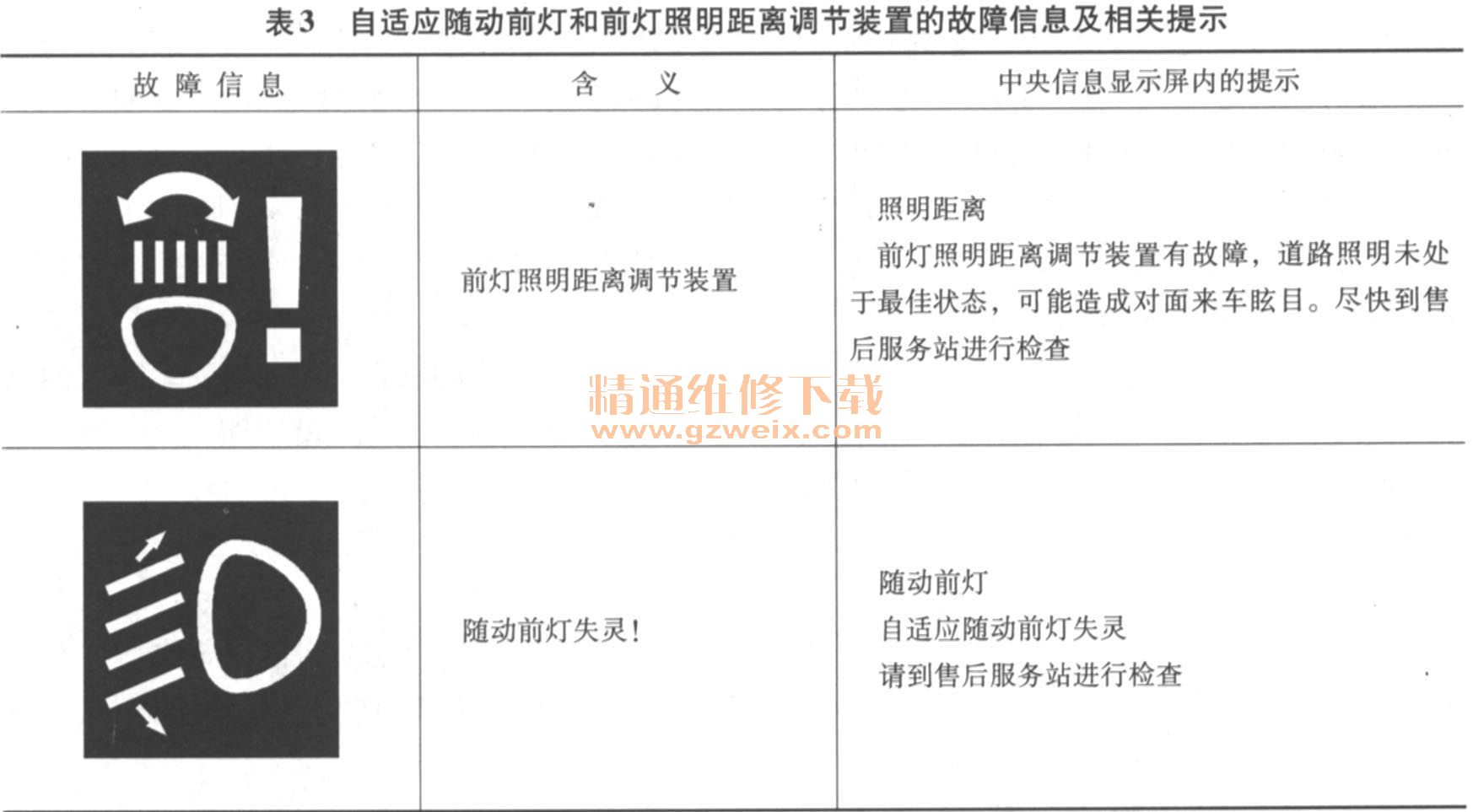
从总线端15关闭开始,脚部空间模块通过LIN总线将要求两个摆动模块移动到关闭位置的信号发送给前灯驱动模块。摆动模块到达关闭位置时,前灯驱动模块就会向脚部空间模块发送一个确认信号。前灯驱磷摸块还负责启用停车示警灯功能,继续运行时间为2s。自适应随动前灯和前灯照明距离调节装置的故障信息及相关提示见表3。
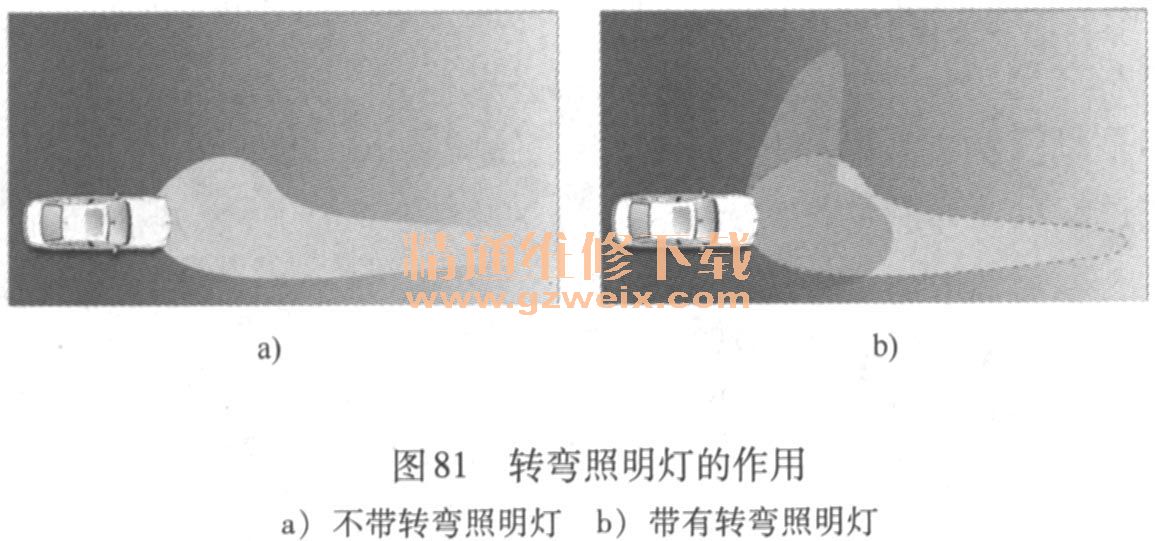
2)转弯照明灯。只有装有自适应随动前灯时,才提供转弯照明灯。转弯照明灯辅助自适应随动前灯为车辆前方和两侧提供照明。如图81所示,通过转弯照明灯可提前或首先注意到转弯区域内的行人或交通情况。
")
")
")
")

